اسپيدكنترل و بردهای تقسيم ولتاژ {جلسه هجدهم}
اسپيدكنترل
در این جلسه قصد داریم راجع به اسپيدكنترل و نحول اتصال اون در کوادكوپتر توضیحات کاملی رو ارایه بدیم.
کاربران محترم، خواندن این جلسه اسپيدكنترل بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
اسپيدكنترل ها بر حسب نوع آنها محل قرارگيرى متفاوتى بر روى فريم دارند.چنانچه اسپيدكنترلرها به صورت تكى باشند معمولا بر روى بازوهاى كوادروتور قرار مى گيرند و اگر به صورت چهارتايى باشند در قسمت مركزى فريم كواد قرار مى گيرند.

Electronic Speed Control
ESC مخفف Electronic Speed Control می باشد و به معنای کنترل سرعت به صورت الکترونیکی است. به بیان ساده اسپید کنترل همان درایورهای موتور براشلس هستند و کار این درایورها نیز این است که جریان را از باتری گرفته و به صورت الکترونیکی به موتورها تغذیه می کنند. نحوه کار بدین صورت است که ما تعداد شش عدد ماسفت را در درون یک اسپیدکنترل جایگذاری کردیم و این شش ماسفت با باز و بسته کردن مسیر جریان تغذیه موتور براشلس را تامین می کنند. برای جزئیات بیشتر می توانید از جلسات کموتاسیون موتور براشلس استفاده کنید:
[post_shop]
اسپیدکنترلرها بر دو نوع اند:
1- اسپیدکنترلرهای ساده
2-اسپیدکنترلرهای برنامه پذیر
در اسپیدکنترلر های ساده همه چی ثابته و نیازی به برنامه ریزی نداره و کارکردن باهاش خیلی راحته. ولی در اسپیدکنترلرهای برنامه پذیر همه چی متغیره و پارامترهایی مثل ولتاژ، جهت چرخش، شتاب و… قابل تنظیمه و شما با استفاده از یک پروگرامر مقادیر دلخواهتون رو بر روی اون پروگرام می کنید.
در این جلسه ما فقط روی اسپید کنترلرهای ساده بحث میکنیم.
در شکل زیر یک اسپیدکنترلر ساخت شرکت EMAX را ملاحظه می کنید:

طبقه بندي اسپيدكنترل
طبقه بندی اسپیدکنترلرها بر اساس حداکثرجریانی است که می توانند تحمل کنند مثلا20 آمپر یا 25 آمپر. قطعا هرچه این آمپر بالاتر بره اسپیدکنترلر بزرگتر و سنگین تری خواهید داشت. در شکل بالا می بینید که روی آن نوشته شده 20A یعنی اینکه حداکثر جریانی که می تواند تحمل کند 20 آمپر است.
نکته: هنگام انتخاب اسپیدکنترل حتما باید جریان قابل تحمل آن حداقل 5 تا 10 آمپر بیشتر از حداکثر جریان موتور باشد.
BEC در اسپيدكنترل
بر روی هر اسپیدکنترل یک BEC نوشته می شود این عبارت مخفف Battery Eliminator Circuit است. حالا BEC چیه؟؟ ترجمه عبارت انگلیسیش که میشه “مدار حذف باتری” که مفهومش اینه که اگر این مدار نبود شما مجبور بودید به جای استفاده از یک باتری از چندتا باتری استفاده کنید. فرض کنید یک باتری داریم که ولتاژ 12ولت و 20 آمپر رو میتونه تامین کنه و بده به موتورهای براشلس تابچرخن. به نظرتون ما میتونیم از این ولتاژ و آمپر برای فلایت کنترلرمون و یا خود اسپیدکنترل استفاده کنیم؟
قطعا جواب منفیه چون جریانی که میکرو و قطعات اطرافش نیاز دارن خیلی کمتره. پس میایم و با استفاده از یک رگولاتور مداری طراحی میکنیم که ولتاژ مثلا5ولت و 2 آمپر رو برامون تامین کنه و بده به فلایت کنترل و اسپیدکنترل. البته بجای اینکار میتونستید از چندتا باتری استفاده کنید مثلا از یک باتری 5ولت و 2آمپر برای برد اصلی و از یک باتری دیگر برای اسپید و از یک باتری دیگر برای…که مسلما نه جای کافی وجود داشت و وزن ربات هم زیاد میشد. بخاطر همین از رگولاتورهای مختلف استفاده میکنن که این همه دردسر نکشیم.
دقت کنید درصورتی که فلایت کنترل و اسپید کنترل رو خودتون طراحی میکنید حتما BEC مربوط به اسپیدکنترلتون با ولتاژ و جریان فلایت کنترلتون همخوانی داشته باشه.
پایه های مربوط به این اسپید کنترل هر کدام به جای خاصی وصل میشود که در شکل زیر نشان داده شده است. در شکل زیر برخلاف شکل بالایی تمامی محل های اتصال لحیم شده اند.
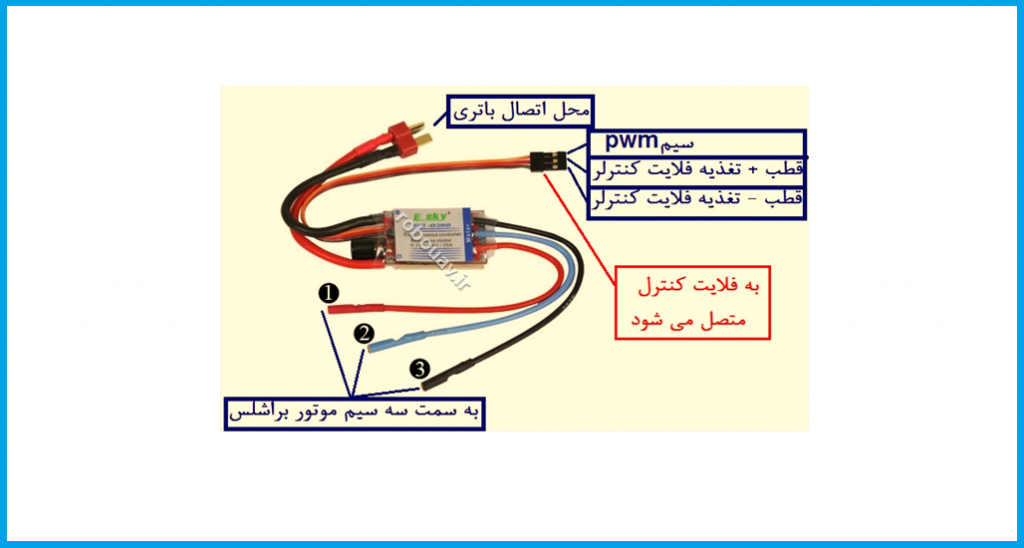
سه تا پایه ای که در شکل نوشتیم به سمت موتور براشلس را به هرطریقی خواستید میتوانید وصل کنید و در صورتی که جای دو تا از آنها را عوض کنید موتور برعکس می چرخد. پس برای عوض کردن جهت چرخش موتور کافیه جای دو تا از این سیم ها رو عوض کنید. دوتا پایه ای که در شکل نوشتیم به باتری وصل میشه رو به برد توزیع ولتاژ وصل کنید و با توجه به اینکه چهار عدد اسپید کنترل دارید برد تقسیم ولتاژ شما هم باید دارای چهار محل تغذیه برای اسپیدکنترل باشد مسلما اگر یک هگزاروتور داشتید باید از یک برد تقسیم ولتاژ که داری شش مکان توزیع ولتاژ بود استفاده می کردید.
برد تقسيم ولتاژ
در زیر یک برد تقسیم ولتاژ که دارای 8 خروجی است و برای هگزاروتور نيز مناسب است را مشاهده می کنید.

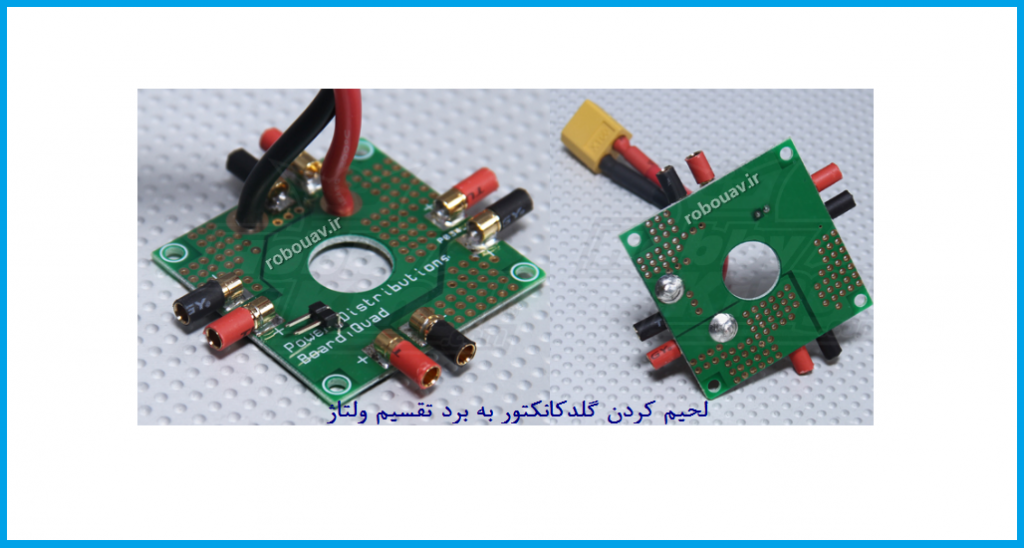
دقت کنید که بردهای تقسيم ولتاژ را طوری لحیم کنید که با کانکتورهای باتری و اسپیدكنترل همخوانى داشته باشد. مثلا اگر گلدکانکتور استفاده می کنید روی برد هم گلدکانکتور لحیم کنید و اگر T کانکتور استفاده میکنید روی برد هم T کانکتور استفاده کنید.
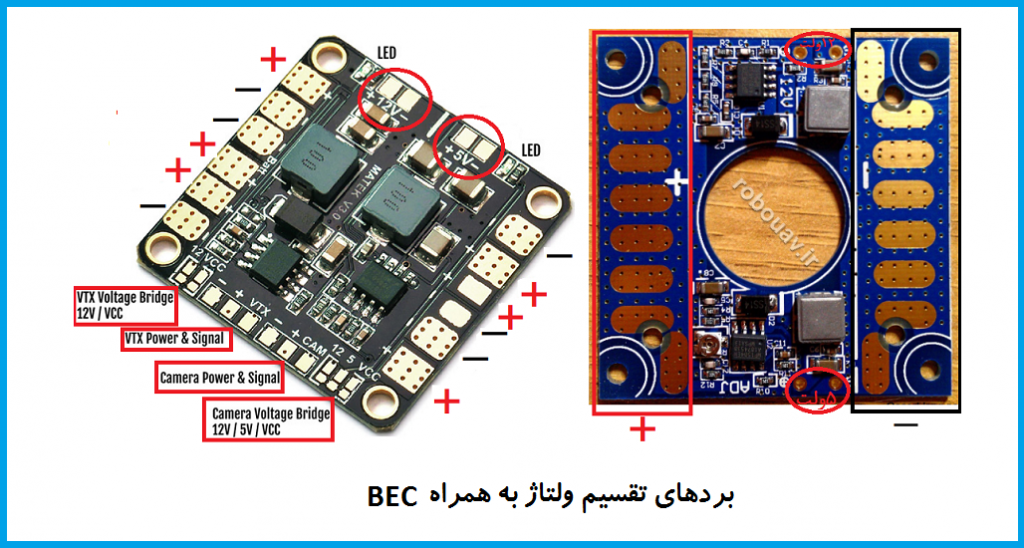
در بعضی از بردهای تقسیم ولتاژ پیشرفته تر خروجی های ولتاژ متفاوتی برای استفاده های همچون FPV یا LED و…بر روی برد قرار داده می شود که البته قبلا با نام BEC این خروجی ها را میشناسیم. شکل زیر به طور واضح گویای این مطلب است.
در صورتی که نخواهیم از کانکتورهای اتصال استفاده کنیم اسپيدكنترل را به طور مستقیم روی برد لحیم می کنیم که البته اینکار توصیه نمی شود چون ممکن است یکی از اسپیدها بسوزد و باید دوباره لحیم ها را باز کنیم و…که مشکلات خاص خودش را دارد. برای چنین بردهای تقسیم ولتاژی که مکان مناسبی جهت لحیم کاری کانکتور روی برد ندارند پیشنهاد میشود از چند سیم که به انتهای آنها کانکتور متصل است را روی برد لحیم کنید و سپس اسپيدكنترل را به کانکتورها متصل کنید.

اسپيدكنترل چهارتايي
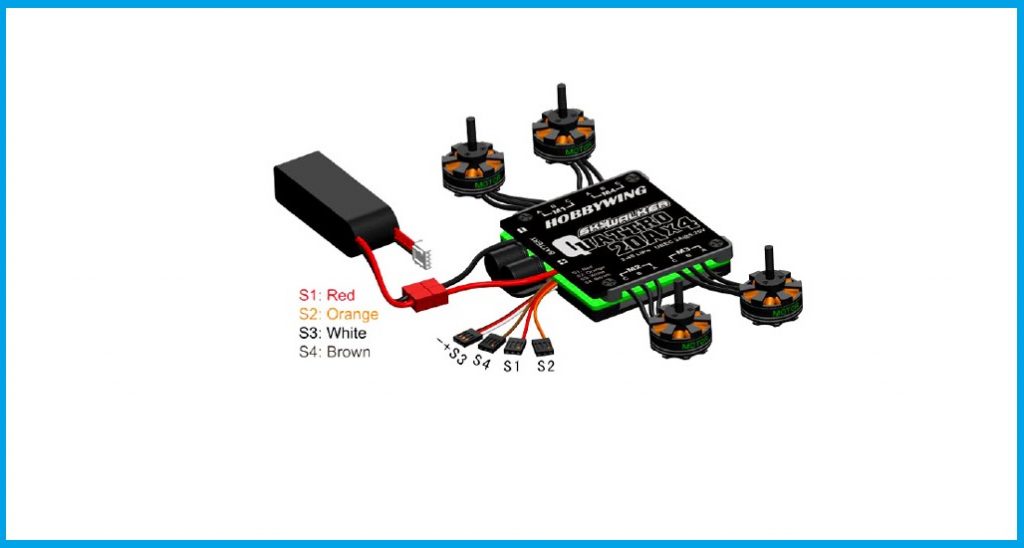
بعضی از اسپيدكنترل ها ترکیبی از 4 تا اسپیدکنترل هستند و همه رو یکجا جمع کردند که مزایا و معایب خاص خودش رو داره. توصیه می کنیم اگر می خواهید از این نوع بخرید حتما جنس خوب بخرید که اگر یکی از اسپیدها سوخت دیگه نمیشه ازش استفاده کرد و سه تایی که نسوخته هم بلا استفاده میمونه. در شکل زیر اینگونه اسپيدكنترل ها را مشاهده می کنید.

روی هر اسپيدكنترل باتری مناسب با آن ذکر می شود مثلا در شکل بالا نوشته شده است که باتری 2 یا 4 سلولی Li-Po مناسب آن است.
شکل زیر هم استفاده از این اسپیدکنترل بعد از نصب را نشان می دهد.
 در اسپيدكنترل هاي آمپر بالا از يك فن به همراه هيت سينك استفاده مي شود تا دفع حرارتي سريع تر صورت گيرد. نكته ديگري كه مي توانيد هنگام نصب اسپيدكنترل به آن دقت كنيد اين است كه محل نصب آن طوري باشد كه در زير جريان هواي توليد شده توسط ملخ ها قرار گيرد تا به راحتي اسپيدكنترل را خنك كند.
در اسپيدكنترل هاي آمپر بالا از يك فن به همراه هيت سينك استفاده مي شود تا دفع حرارتي سريع تر صورت گيرد. نكته ديگري كه مي توانيد هنگام نصب اسپيدكنترل به آن دقت كنيد اين است كه محل نصب آن طوري باشد كه در زير جريان هواي توليد شده توسط ملخ ها قرار گيرد تا به راحتي اسپيدكنترل را خنك كند.

ممکنه اسپیدکنترل شما داری BEC نباشه در اینصورت شما می توانید از UBEC استفاده کنید مخفف Universal Battery Eliminator Circuit می باشد. حتی اگر اسپيدكنترل BEC داشت باز هم می تونید از UBEC استفاده کنید.
[/post_shop]
برای خرید اسپیدکنترل می توانید از لینک های زیر استفاده کنید: برای دریافت آخرین مطالب سایت و همچنین مطالب منحصر به فرد دیگر که در سایت منتشر نمی شوند میتوانید در کانال تلگرام ما عضو شوید و یا در اینستاگرام ما را فالوو کنید:
مطالب زیر را حتما بخوانید





57 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
باسلام
از چه زمانی آموزش طراحی ربات پنده می گذارید. خیلی منتظر موندم تا آموزش های دیگه تموم بشوند.
می خواهم کواد طراحی کنم و وبسایت شما برای یادگیری عالی بود. چند تا سوال داشتم
از فلایت های متن باز نرم افزار کدام بهتر است. البته از صفر سخت افزار با تمام امکانات را طراحی کردم وفقط کد نویسی ونرم افزار نداره
در اسپید های تجاری از چه نوع سوئیچ کننده و از چه میکرویی استفاده می شود؟ماسفت یا یک نوع دیگر
محاسبات کواد را از کجا پیدا کنم.مثل وزن باطری و طول ملخ و موتور فریم یا روش های کد نویسی.
آیا مجله یا وبسایت فوق العاده ای هست تا محاسبات را گیر بیاورم
با تشکر
سلام دوست عزیز
1- در مورد آموزش ها ما مرحله به مرحله جلو رفتیم و بقیه جلسات هم کم کم لود می کنیم ولی با توجه به اینکه ما نظرات تمامی دوستان را مدنظر قرار می دهیم جلسات جدیدی اضافه می شود.
2- از فلایت های متن باز multiwii و APM پیشنهاد می کنم. البته محیط نرم افزاری APM بسیار راحت تر از مولتی است و کارکردن با آن آسانتر است.
3- در اسپیدکنترل ها میکروی مورد استفاده در آنها در دستورالعمل هرکدام ذکر شده است که با مراجعه به دستورالعمل نوع آن را می توانید مشاهده کنید. بیشتر اسپیدها از میکروهای ATMEL استفاده می کنند.
4- در مورد محاسبات کواد هم در هر مرحله سعی کردیم که با جزییات بیان کنیم چنانچه سوالی باقی مانده است بپرسید تا پاسخ داده شود.
5- وب سایت های دوستان ما هم که در زمینه کوادروتور کار می کنند در زیر معرفی می کنیم که می توانید به آنها مراجعه کنید.
http://www.multimetr.ir
http://www.dmf313.ir
http://www.wle.ir
http://www.robotical.ir
با عرض سلام و خسته نباشید
میشه لطف کنید و بفرمایید تفاوت اسپید کنترل (esc) که در کواد کوپترها استفاده میشود با درایو کنترل a4988 یا drv8825 که در دستگاه cnc مورد استفاده قرار میگیرد در چیست؟
آیا میتوان به جای esc از آی سی های a4988 یا drv8825 که به همراه شیلد cnc به آردوینو متصل می شوند استفاده نمود؟
با تشکر
موفق باشید.
با سلام
drv8825 مخصوص استپرموتورها طراحی شده است و خروجی هاش کاملا متفاوت با موتورهای براشلس می باشد.
موفق باشید
سلام و عرض ادب و خسته نباشيد
مطالب واقعا مفيد و اموزنده بود و قابل فهم است
لطفا اموزش پروگرام كردن اسپيد كنترل ها را قرار دهيد چون خيليا از كساني كه تازه كار هستن نحوهي پروگرام كردن اسپيد كنترل ها عاجز هستن
با تشكر
سلام
ان شاالله به زودي قرار ميدهيم
موفق باشيد
سلام، تشکر بابت مطالبتون. بسیار جالب بود. میتونید درباره اسپیدکنترلهای قابل برنامه ریزی هم صحبت کنید؟
سلام
ان شاالله بزودي منتشر مي كنيم
موفق باشيد