طراحی یک کنترل کننده برای کوادروتور{جلسه اول}
مقدمه
قبل از شروع به خواندن مطالب این دوره ابتدا چند جلسه اولیه دوره مقدماتی کوادروتور را مطالعه نمایید تا از بیان مطالب تکراری خودداری گردد. لینک مربوط به جلسات بعد در انتهای هر جلسه قرار داده شده است.
https://robouav.org/quadcopter-types/
مزیت اصلی استفاده از عمودپروازها، ابن است که میتوان به توانایی بالاي آنها براي پرواز در ارتفاء پایین، محیطهاي سربسته و جاهایی که قابلیت مانور بالا نیازمند است، در مقایسه با سامانه های ثابت بال اشاره نمود . براي چنین کاربردهایی از پرنده های روتور دار که توانایی هاور ماندن در هوا را دارند، استفاده میشود. ترکیبی از مزایایی، چون کارایی بالا، فراگیر شدن و کاهش قیمت منجر به افزایش علاقه به سامانه هاي روتور دار شده است.
کوادروتور
کوادروتور نوعی عمودپرواز است که بخاطر استفاده از چهار ملخ بصورت صلیبی این لقب را گرفته است. این نوع چینش موتور این امکان را میدهد تا بتواند به راحتی و بطور یکسان در تمامی جهات حرکت کند و قدرت مانور فوق العاده اي داشته باشد. اما مشکل اساسی در طراحی کوادروتور، مسئله پایداري آن است که کار بسیار پیچیده ای است.
مزایای کوادروتور
چهار موتور مزایاي قابل توجهی را نسبت به هواپیماهاي با بال ثابت دارد. اول اینکه این پرنده بر خلاف هواپیما براي ماندن در آسمان نیازي به حفظ سرعت به سمت جلو ندارد و تغییر جهت به سمت جلو در فضاي کوچکی میسر است. توانایی این ربات براي پرواز بر روي مناطق خاص منحصر بفرد است. در نهایت می توان به توانایی کوادروتور براي پرواز و فرود عمودي با نیاز به حداقل تجهیزات جانبی اشاره کرد، که در مقایسه با ربات هاي بال ثابت به مکانیزمهایی مانند ریلهاي پرتاب براي پرواز و غیره نیازي ندارد. یکی از عیب های اساسی هلی کوپتر ها پیچیدگی مکانیکی آنهاست. براي مثال، براي تغییر زاویه پره ها هنگام پرواز، به مکانیزم یپیچیده ای نیاز دارد. یعنی برای حرکت از یک روتور افقی در انتهاي دم براي خنثی کردن عکس العمل نیروي گشتاور روتور اصلی بر بدنه استفاده میشود.
انتقال نیروي لازم از روتور اصلی به روتور تعبیه شده در دم از طریق جعبه دنده و صفحه روتور انجام میشود. که نیاز به این تجهیزات، پیچیدگی کار و فضاي مورد نیاز در هلی کوپتر را افزایش میدهد. طراحی بصورت کوادروتور تمامی این عیب ها را برطرف می سازد.
نحوه کار کوادروتور
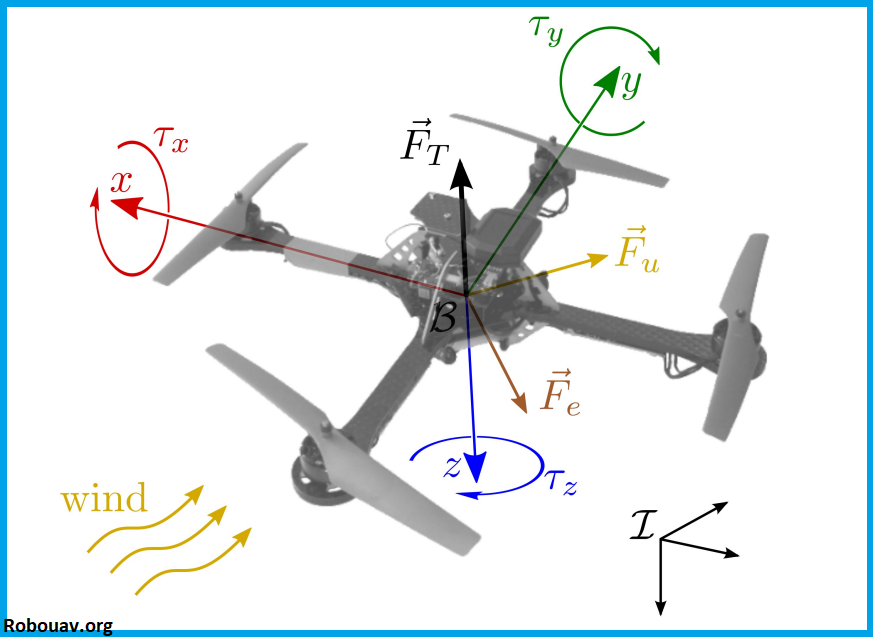
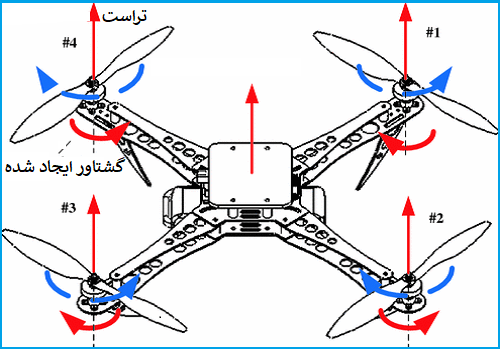
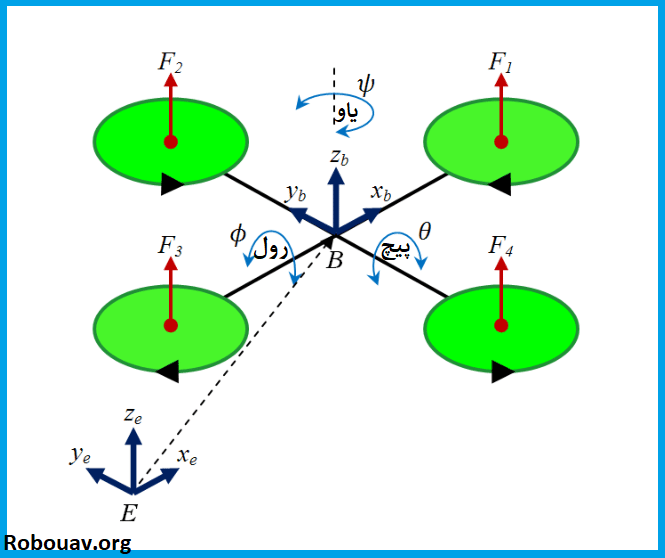
هر موتور در کوادروتور گشتاور و تراست معینی حول محور دوران خود ایجاد میکند. همه ملخهاي کوادروتور کاملا مشابه نیستند. در حقیقت ملخها در دو گروه با تیغه هاي راست گرد و چپ گرد جاي می گیرند که در جهت مخالف میچرخند. ایجاد تراست بدین صورت است که اگر ملخهاي با تیغه راست گرد دورانی درجهت حرکت عقربه ها ي ساعت در جهت بالا داشته باشد، ملخهاي با تیغه چپ گرد باید با همان دور موتور و در جهت عکس عقربه هاي ساعت می چرخند. با بکارگیري از ملخهاي راست گرد و چپ گرد، میتوان گشتاورهاي ایجاد شده در چهار روتور کوادروتور را خنثی کرد. در نتیجه اگر ملخها با سرعت یکسان دوران داشته باشند، گشاورایجاد شده توسط جفت ملخ راست گرد، گشتاور حاصل از دروان جفت موتور چپ گرد را خنثی مکینند و کوادروتور حول مرکز گرانش خود ثابت خواهد ماند. براي اینکه دورانهاي یک کوادروتور را حول مرکز جرم آن نشان دهیم، سه پارامتر دینامیکی زوایاي رول ، پیچ و یاو را تعریف می کنیم. تغییر در زاویه پیچ منجر به جابه جایی کوادرتور به سمت جلو خواهد شد. و با تغییر زاویه رول جابجایی عرضی به وجود می آید. پس با تغییراین سه زاویه میتوان کوادروتور را به هر جهتی هدایت کرد. برآیند گشتاورهاي وارد بر کوادروتور سعی در دوران دادن کوادروتور حول مرکز جرم آن در جهت هاي رول، پیچ و یاو دارند بنابراین سه زاویه مذکور به شدت برای ما مهم هستند و به ترتیب با اسامی انگلیسی Roll و Pitch و Yaw نیز نشان می دهیم.
اهداف این دوره
براي به پرواز در آوردن یک کوادروتور، به کنترل بسیار دقیق و حساس موتورها نیاز داریم. به منظور کنترل این پرنده به مدل ریاضی از کوادروتور نیاز داریم تا بتوانیم کنترل کننده را طراحی و تست کنیم. بدین منظور اهداف زیر در این دوره قابل دستیابی است:
- معادلات دینامیک حاکم بر کوادروتور
- ماتریسهاي فضاي حالت براي معادلات دینامیک
- طراحی یک کنترل کننده براي کوادروتور
- پیاده سازی معادلات دینامیکی کوادکوپتر و شبیه سازی آن در نرم افزار
دوستان عزیز بیشتر دوره های مربوط به این وب سایت رایگان می باشد. در صورت تمایل می توانید به اندازه وسع مالی خود(هر چند ناچیز) جهت پرداخت هزینه های نگهداری وب سایت از ما حمایت کنید:
این جلسه هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
154 بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
299 بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
165 بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
160 بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
210 بازدید
دیدگاهتان را بنویسید