آموزش نرم افزار ميشن پلنر {جلسه بيست و ششم}
مقدمه اى بر آموزش نرم افزار ميشن پلنر
نرم افزار ميشن پلنر يك نرم افزار متن باز است كه براي ويندوز و اندروید و لینوکس در دسترس مي باشد. براي شروع آموزش نرم افزار ميشن پلنر ابتدا از لينك زير آخرين ورژن اين نرم افزار را دانلود كنيد.
کاربران محترم، خواندن جلسه آموزش نرم افزار ميشن پلنر بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
همچنین تمامی نکات لازم در خصوص برد APM در جلسات قبل توضیح داده شده است.
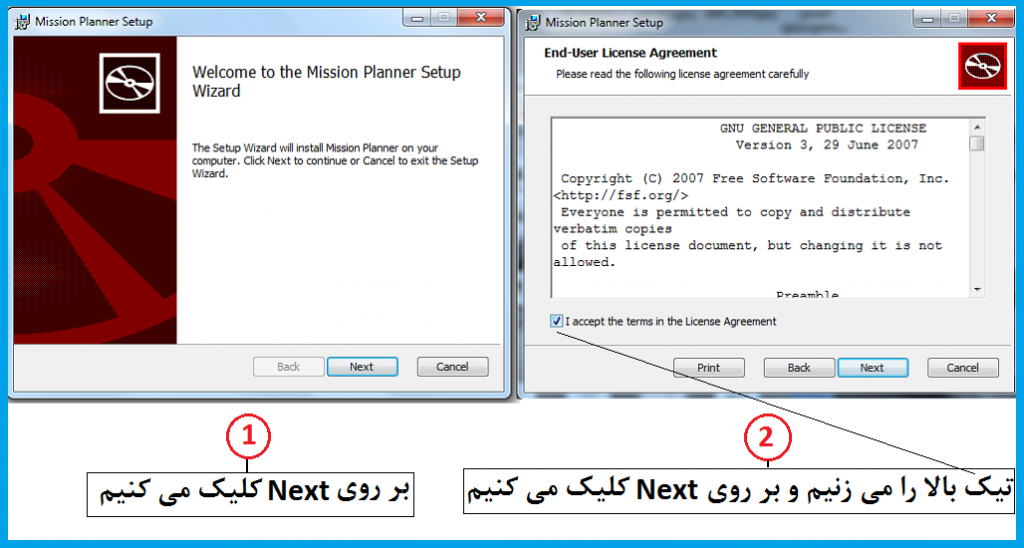
بعد از دانلود نرم افزار مطابق شكل هاي زير مرحله به مرحله آن را نصب كنيد تا آموزش نرم افزار ميشن پلنر را شروع كنيم.
[post_shop]
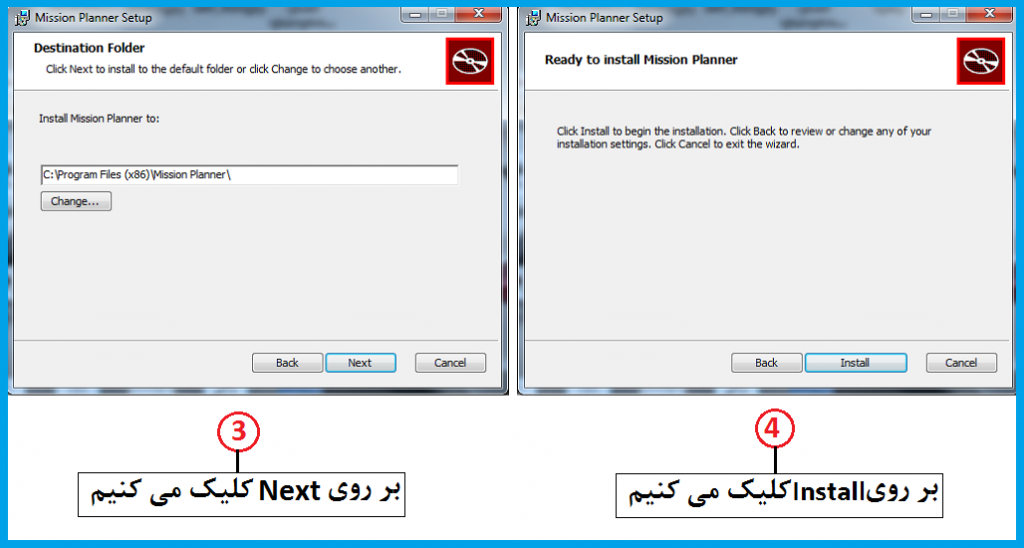
مرحله سوم و چهارم آموزش نرم افزار ميشن پلنر به صورت زیر می باشد.
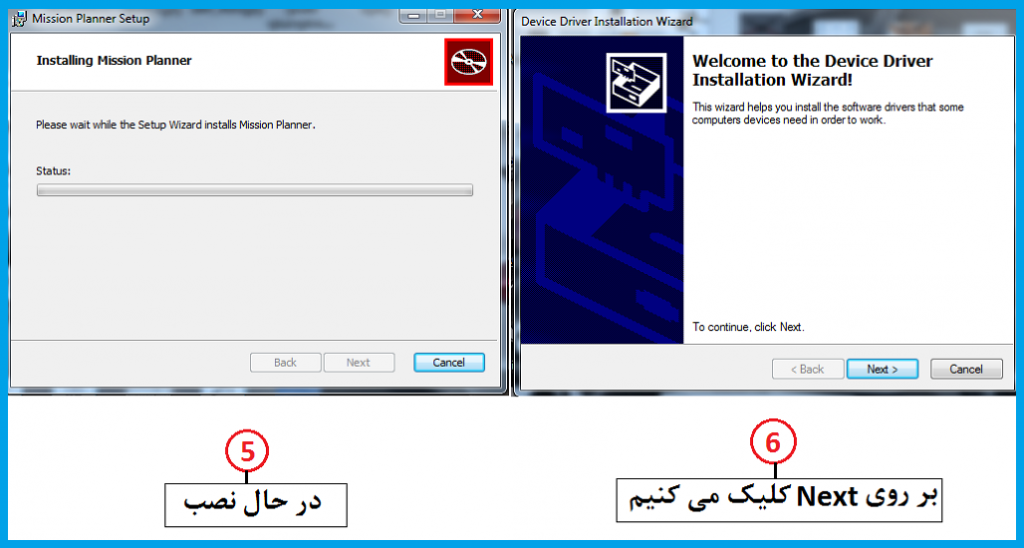
مرحله پنجم و ششم به صورت زیر می باشد.
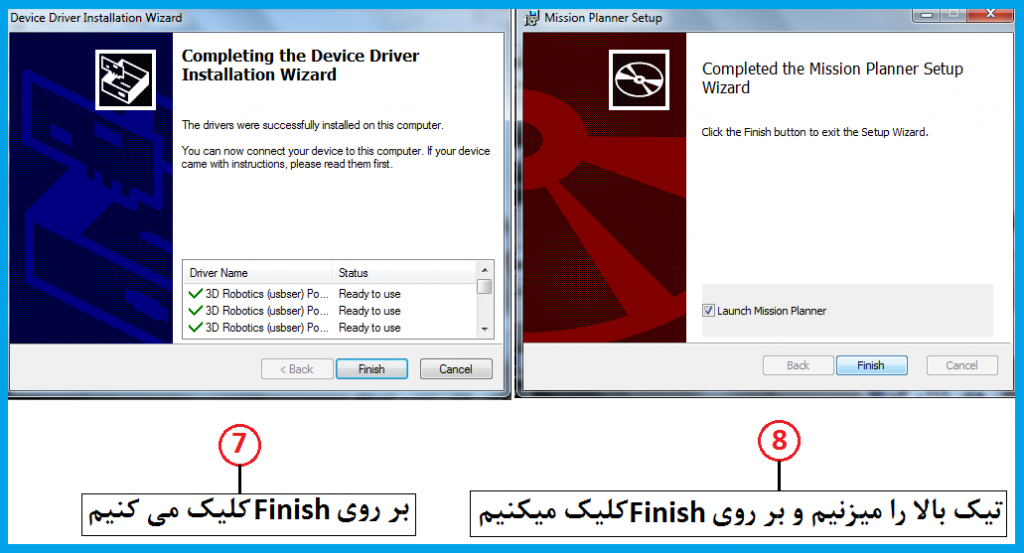
مرحله هفتم و هشتم هم نصب نرم افزار تمام می شود و می توانید آن را لود کنید.
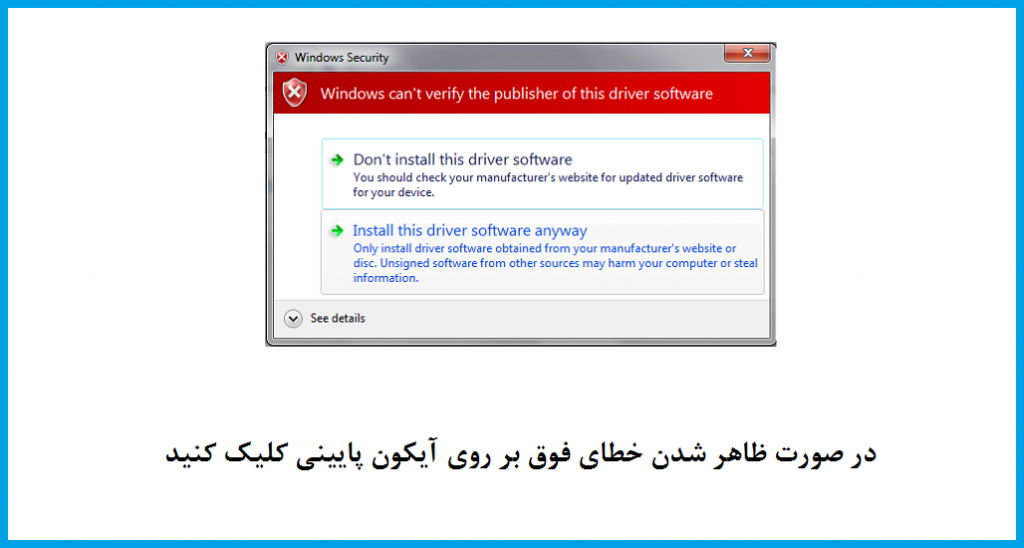
در طي مراحل نصب ممكن است با پيغام خطايي مشابه پيام زير مواجه شويد كه بر روي Install this driver software anyway كليك مي كنيد.
بعد از نصب نرم افزار در صورتی که نرم افزار باز نشد یا برای دفعات بعدی خواستید نرم افزار را باز کنید به منوی start می روید و از گزینه All Programs نرم افزار Mission Planner را انتخاب کنید تا باز شود.

تا اینجا مراحل نصب نرم افزار و لود شدن آن را مشاهده نمودید. از اینجا به بعد وارد محیط نرم افزار می شویم و تک تک گزینه ها را تنظیم می کنیم.

بعد از نصب نرم افزار بر روي Initial Setup كليك مي كنيم و گزينه Install Firmware در سمت چپ صفحه را انتخاب مي كنيم. وظيفه Firmware يا فرمور ايجاد ارتباط بين سخت افزار و نرم افزار مي باشد و در حقيقت چيزي مشابه سيستم عامل مي باشد.

بعد از اينكه فرمور مناسب نصب شد بر روی Wizard در منوی Initial Setup کلیک مي كنيم و بعد از آن پنجره ی The Mission Planner Setup Wizard نشان داده می شود.
نكته: دوستاني كه براي بار اول با اين نرم افزار كار مي كنند بهتراست براي جلوگيري از سردرگم شدن از گزينه Wizard به جاي manual استفاده كنند.

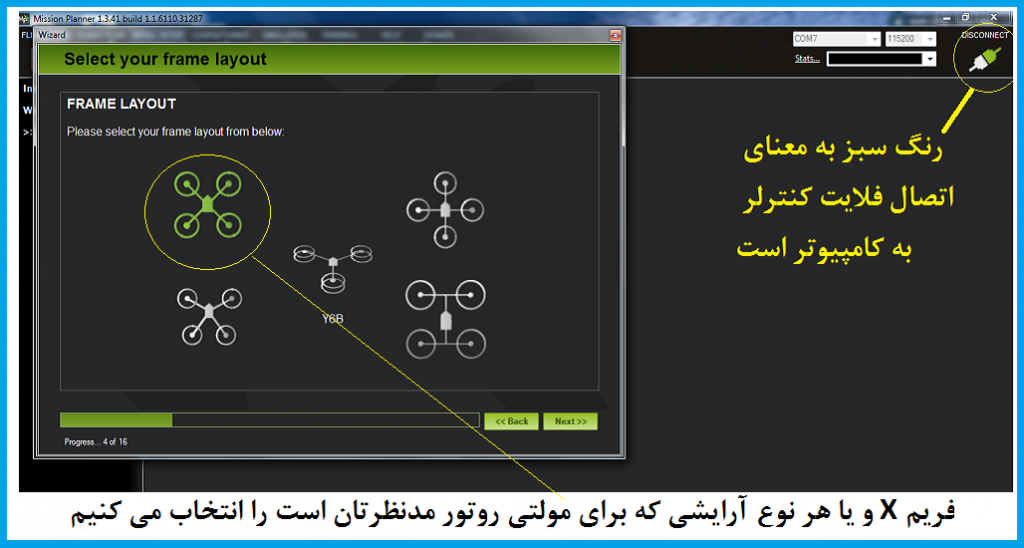
بعد از انتخاب مولتي روتور نوع مولتي روتور كه چند موتوره بودن آن را مشخص مي كند تعيين مي كنيم.

بعد از انتخاب مولتي روتور و كليك بر روي next فلايت كنترل را به كامپيوتر متصل مي كنيم و پورت مورد نظر را انتخاب مي كنيم تا متصل شود. دقت كنيد كه فلايت كنترل مورد نظر بر روي APM باشد و Pixhawk يا PX4به اشتباه انتخاب نشده باشد.
بعد از انتخاب آرايش موتورها براي مولتي روتور وارد مرحله كاليبراسيون شتاب سنج مي شويم.
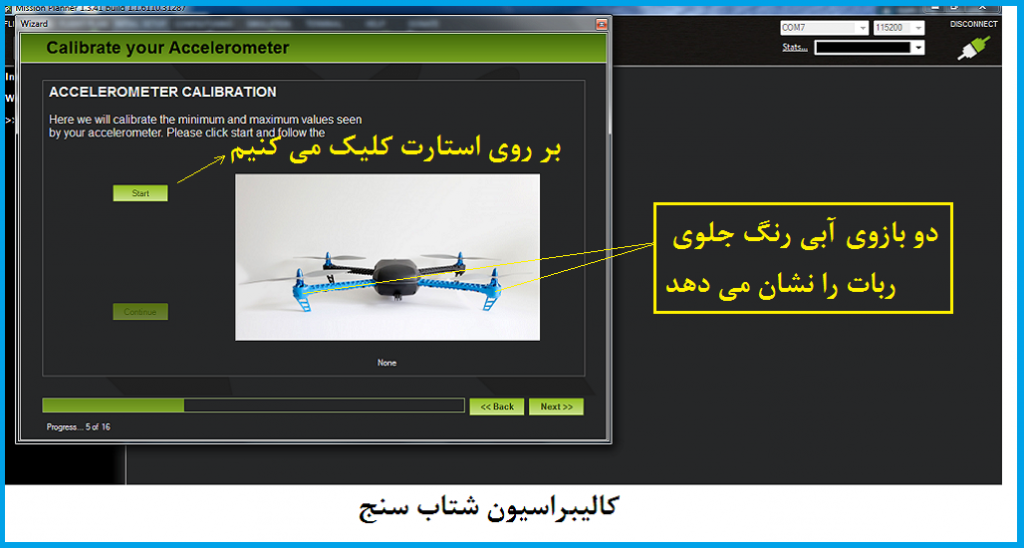
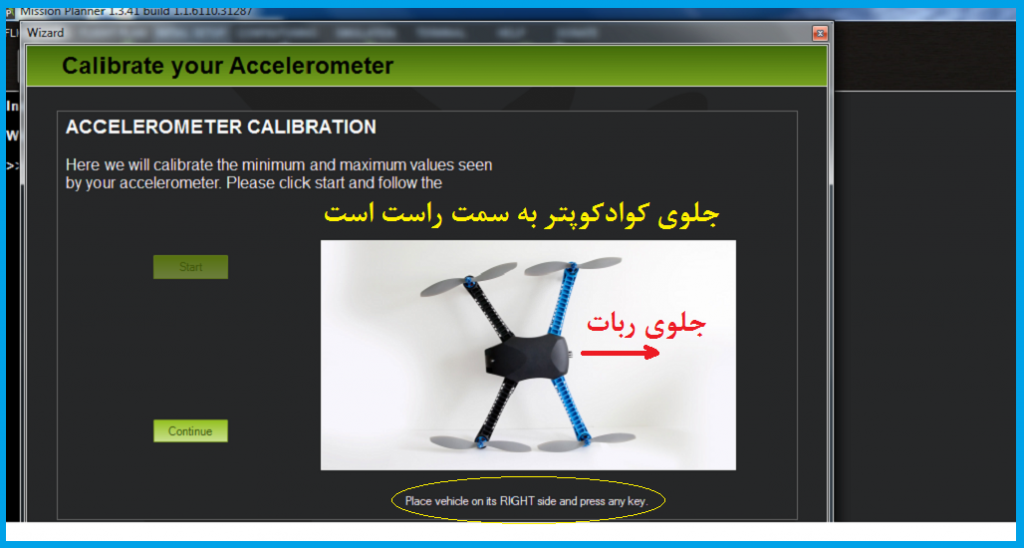
در اين مرحله نزم افزار از شما مي خواهد كه ربات را در موقعيت هاي مختلف به مدت چند ثانيه نگه داريد تا شتاب سنج كاليبره شود. براي اينكار در حالي كه كابل اتصال به كامپيوتر به ربات متصل است كوادكوپتر را با دو دست بلند مي كنيم و در موقعيت هاي نشان داده شده به مدت چند ثانيه نگه مي داريم و سپس بر روي آيكون Continue كليك مي كنيم.
ابتدا به حالت افقي قرار مي دهيم و بر روي ادامه كليك مي كنيم.

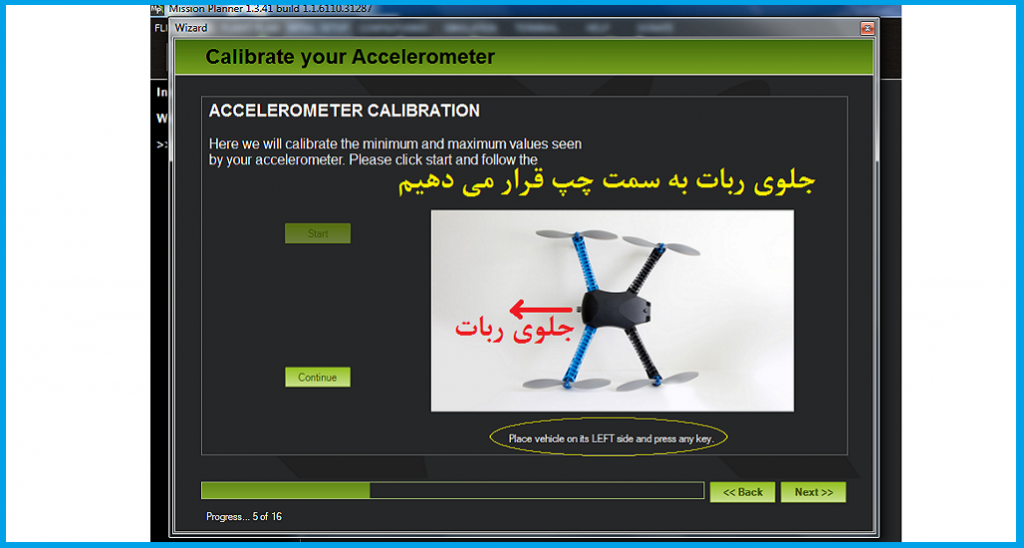
سپس كوادكوپتر را در حالت ايستاده قرار داده طوري كه جلوي آن به سمت چپ باشد.
سپس كوادكوپتر را در حالت ايستاده قرار داده طوري كه جلوي آن به سمت راست باشد.
سپس كوادكوپتر را در حالت ايستاده قرار داده طوري كه جلوي آن به سمت پايين باشد.

سپس كوادكوپتر را در حالت ايستاده قرار داده طوري كه جلوي آن به سمت بالا باشد.

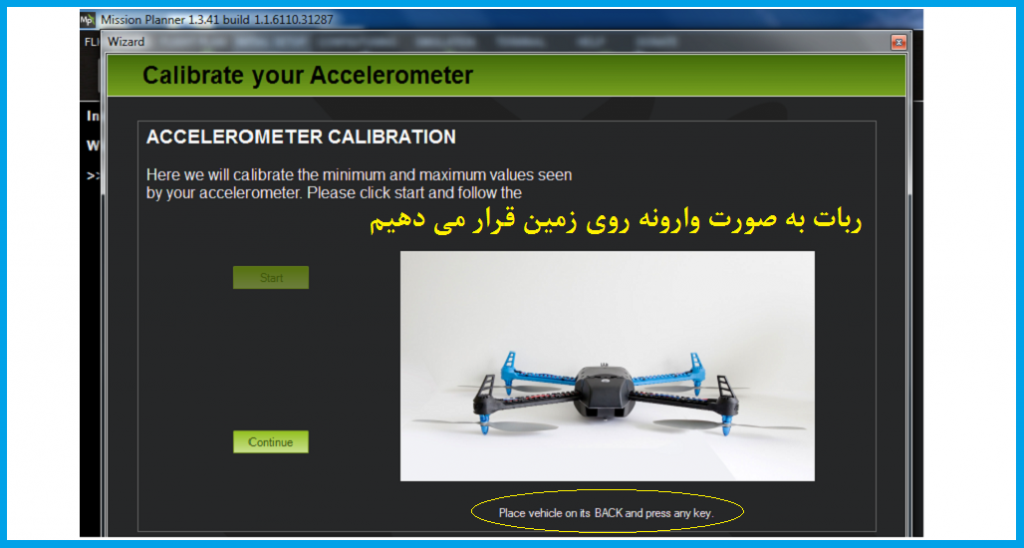
سپس كوادكوپتر را در حالت وارونه روي زمين قرار مي دهيم.
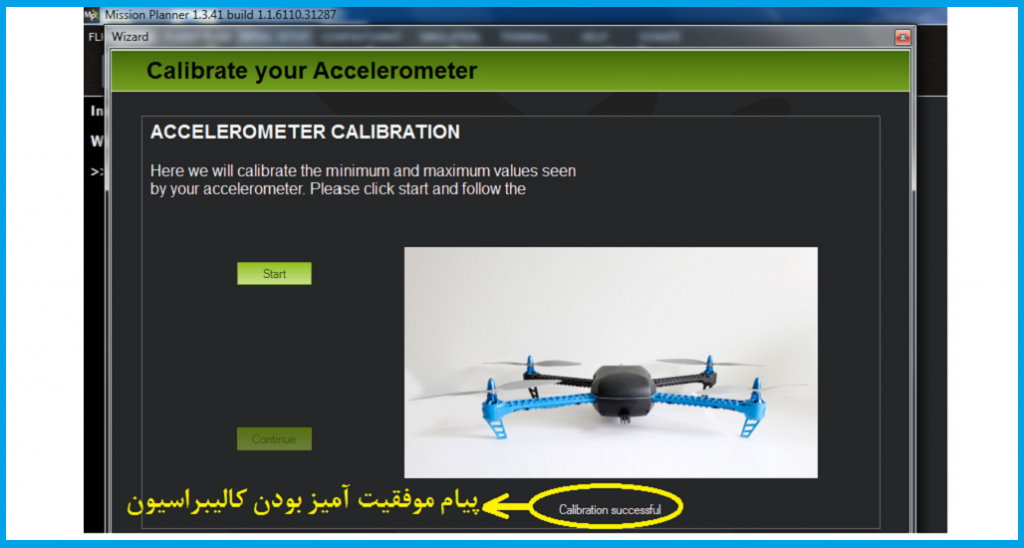
در نهايت بعدا از اتمام كاليبراسيون در صورتي كه با موفقيت به اتمام برسد پيام زير نمايش داده مي شود.
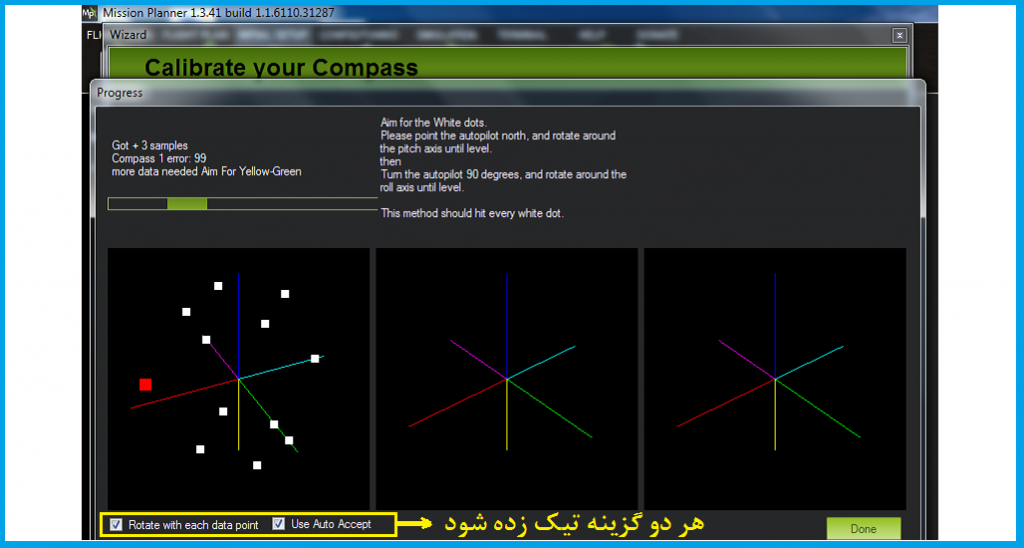
بعد از اتمام كاليبراسيون شتاب سنج وارد مراحل كاليبراسيون ميشويم. براي اينكار بر روي LIVE CALIBRATION كليك مي كنيم.

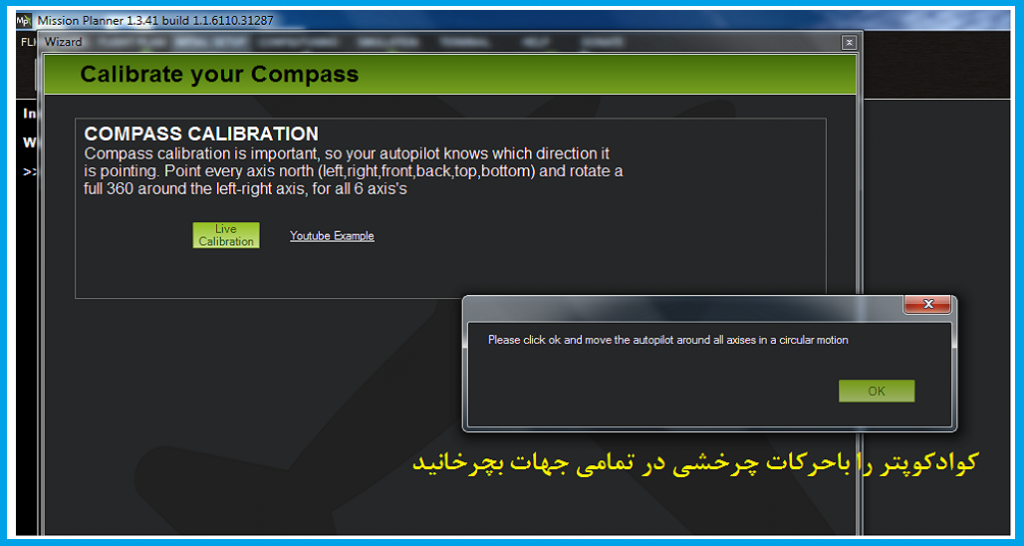
پنجره اي كه باز مي شود سه محور سفيد دارد كه هنگام كاليبراسيون اطراف اين محورها با نقطه هاي رنگي پر مي شود و در انتها يك بوق به منزله موفقيت آميز بودن كاليبراسيون زده مي شود.
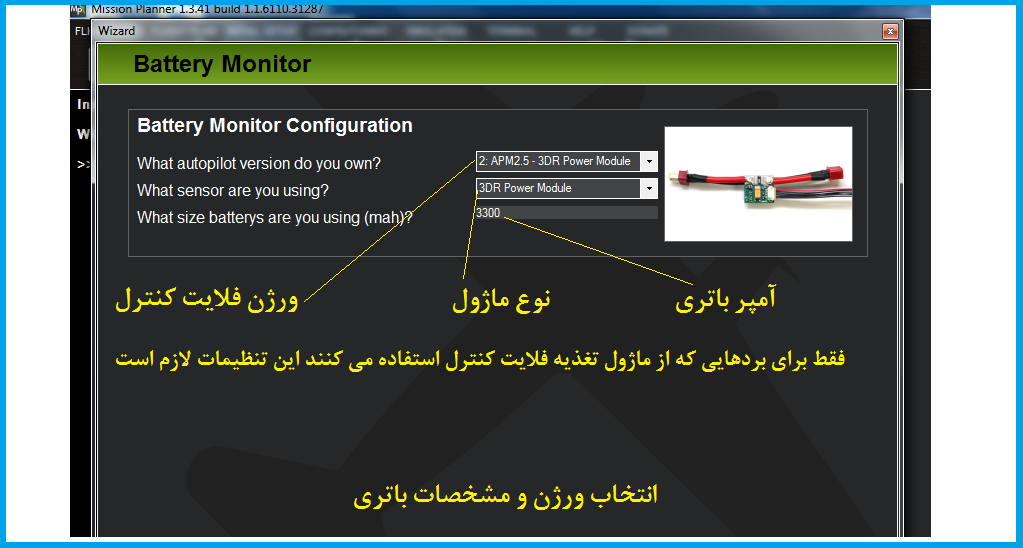
بعد از كاليبراسيون قطب نما نوبت به تنظيمات ماژول تغذيه فلايت كنترل مي رسد و فقط مخصوص افرادي است كه اين ماژول را تهيه كرده اند وگرنه نيازي به تنظيم آن نيست.
حال نوبت به كاليبراسيون راديوكنترل مي رسد.

بعد از كليك بر روي گزينه ادامه پنجره زير ظاهر مي شود. هنوز راديوكنترل خاموش است و رنگ هاي سبز محدوده خاصي ندارند.

با كليد بر روي Calibrate Radio پنجره زير ظاهر مي شود. حتما نكات مربوط به كليدهاي بالاي راديوكنترل كه براي كانال 5 در نظر ميگيريم را از جلسه راديوكنترل مطالعه كنيد.
با ظاهر شدن اين پنجره فرستنده را روشن كنيد و جوي استيك هاي هر كانال را از مقدار حداقل تا مقدار حداكثر حركت دهيد تا خط هاي قرمز رنگ ظاهر شود.

با كليك بر روي گزينه ادامه پنجره اي ظاهر مي شود كه مربوط به كانال 5 راديوكنترل است ظاهر مي شود. اين تنظيمات اختياري است و فقط براي دوستاني است كه ميخواهند بيش از 4كانال را فعال كنند و از مدهاي كنترلي فلايت كنترل APM استفاده كنند. دقت كنيد كه براي تنظيم كانال 5 راديوكنترل هم مي توانيد از كليدهاي دوحالته و سه حالته بالاي فرستنده استفاده كنيد و هم از كليدهاي چرخشي(ولوم) بالاي فرستنده استفاده كنيد. در صورتي كه كليددوحالته را براي كانال 5 فرستنده انتخاب كرديد فقط به دو مد اول و آخر شكل زير دسترسي داريد و در صورتي كه كليد سه حالته انتخاب كرديد فقط به سه مد شكل زير دسترسي داريد و در صورتي كه كليد ولوم را انتخاب مي كنيد به تمامي مدها دسترسى داريد و با چرخش ولوم مى توانيد هركدام از اين مدها را انتخاب كنيد.
دقت كنيد كه براى مشخص بودن حالت مورد نظر در مواقع استفاده از ولو حتما در كنار كليد ولوم علامت گذارى از 1 تا 6 انجام دهيد تا بتوانيد مد مورد نظر را به درستى انتخاب كنيد.

در انتها با انتخاب گزينه Complete اين مدها را ذخيره كنيد.
پنجره هاى بعدى مربوط به تنظيمات Fail Safe و Geo fence مى باشد كه فعلا به آن نيازى نداريد و مى توانيد ازآن رد شويد.
پس از اتمام مراحل فوق نوبت به كاليبراسيون اسپيدكنترلر ها مى رسد كه براى اينكار با نرم افزار كارى نداريم.
مراحل كاليبراسيون دستى اسپيدكنترلرها
اسپيدكنترلرها به دليل تنوعى كه دارند به روش هاى مختلفى نيز كاليبره مي شوند. بنابراين قبل از هر چيز اگر دستورالعملى همراه اسپيدكنترلرتان است آن را استفاده كنيد ولى معمولا دو روش زير استفاده مى شود:
- كاليبراسيون به صورت همزمان يا All at once calibration
- كاليبراسيون به صورت تك به تك
هميشه ابتدا روش اول يعنى كاليبراسيون به صورت همزمان را انجام دهيد و اگر كاليبراسيون به درستى انجام نشد به سراغ روش دوم برويد زيرا روش اول يك روش جامع است و در بيشتر اسپيدكنترلرها با موفقيت انجام پذير است. قبل از هر چيز نيز ملخ ها را باز كنيد و USB نيز از كامپيوتر جدا كنيد.

مراحل كاليبراسيون دستى اسپيدكنترلرها به روش همزمان
- راديوكنترل را روشن كنيد و جوى استيك تراتل را در حداكثر مقدار ممكن قرار دهيد.

- باتري كوادكوپتر را متصل كنيد. چراغ هاى قرمز و آبى و زرد فلايت كنترل به صورت متوالى روشن مى شوند كه نشان از آماده بودن فلايت كنترل براى كاليبراسيون اسپيدها مى باشد.

- بعد از چند ثانيه باترى كوادكوپتر را جدا كنيد و مجددا متصل كنيد. دقت كنيد كه تراتل همچنان در وضعيت ماكس قرار دارد و به آن دست نزنيد تا مرحله چهار فرا برسد.

- بعد از اينكه باترى را متصل كرديد صداى چند بوق مى شنويد(اگر باترى شما 3 سلول دارد صداى سه بوق مىشنويد و اگر 4 سلول دارد صداى چهار بوق مى شنويد و…) پس از شنيدن صداى بوق مربوط به سلولهاى باترى دو بوق پشت سرهم نيز به گوش مى رسد. با اتمام اين دو بوق جوى استيك تراتل را به سمت پايين حركت دهيد. به محض رسيدن تراتل به پايين ترين نقطه صداى يك بوق طولانى به گوش مى رسد كه نشانه پايان كاليبراسيون اسپيدكنترلرها مى باشد.

- بعد از شنيدن صداى بوق طولانى پايانى كمى تراتل را به سمت بالا حركت دهيد تا از وضعيت چرخش موتورها نيز مطمعن شويد و سپس تراتل را كم كنيد و باترى را جدا كنيد تا از مد كاليبراسيون اسپيدكنترلرها خارج شويد. بدين ترتيب كاليبراسيون اسپيدكنترلرها انجام مى شود.
[/post_shop]
مراحل كاليبراسيون دستى اسپيدكنترلرها به روش تك به تك
همانطور كه در بالا نيز شرح داده شد در صورتى كه از روش اول كاليبراسيون موفق آميز نبود به سراغ اين روش مى آييم.
- ابتدا كانكتور سه سيمه مربوط به اسپيدكنترل را به كانال تراتل گيرنده راديوكنترل متصل كنيد(معمولا كانال 3 مربوط به تراتل است).
- فرستنده را روشن كنيد و تراتل را در حالت بيشترين مقدار خود قرار دهيد.
- باترى را متصل كنيد.
- بعد از اتصال باترى صداى بوق هايى(اگر باترى سه سلول دارد سه بوق و اگر چهار سلول دارد چهار بوق و…) صداى 2 بوق مجزا نيز شنيده مى شود. پس از اتمام اين دو بوق پايانى تراتل را در كمترين مقدار خود قرار دهيد.
- بعد از پايين آوردن اهرم تراتل صداى چند بوق و يك بوق طولانى به گوش مى رسد كه نشان از پايان كاليبراسيون اين اسپيدكنترل است.
- باترى را جدا كنيد و اين مراحل را براى 3 اسپيدكنترل ديگر نيز تكرار كنيد.
البته روش سومى نيز وجود دارد كه با وجود دو روش بالا نيازى به روش سوم در آموزش نرم افزار ميشن پلنر نيست.
تا اينجا ما حداقل تنظيماتى كه براى يك پرواز لازم بود را در آموزش نرم افزار ميشن پلنر انجام داديم. در جلسات بعدى تنظيمات پيشرفته و انواع مدهاى فلايت كنترل APM را به منظور تكميل شدن آموزش نرم افزار ميشن پلنر شرح مى دهيم.
جلسه آموزش نرم افزار ميشن پلنر هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.67k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
31.5k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.9k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.45k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2.13k بازدید
154 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
در ادامه …..
میشه با این توضیحات برد APM را براحتی برای کار زیردریایی در نظر بگیریم
یا باید سمت خود برد آردینو …..برویم
برای پایداری و اتوماتیک شدن ؟
پایلوت ما
دارای سه موتور
دوتا جلو
یکی عقب
دوتا سرور موتور
مخزن گازی
و تعیین چندین مد هست
متشکرم
منتظر راهنمایی های شیوایتان هستم
یا علی
سلام مجدد
بله مي توانيد با استفاده از APM اينكار را انجام دهيد.
موفق باشيد.
بنده توسط سایت بسیار خوب شما آشنایی نسبی با آردو پایلوت پیدا کردم
ما یک مدل زیر دریایی می خواهیم بسازیم
لطفا درباره قابلیت کار با برد APMراهنمایی بفرمایید و یا
پیشنهاد بدهید با چه بردی کار کنیم که :
?بتوان مدهای gps پیاده سازی شود ویا برای مدهای TTl با استفاده از IMU ها برنامه نویسی مضاعف کرد
?بتوان برای کارکرد موتورها برنامه نویسی کرد با توجه به رادیو کنترل فرستنده
و طبق خواسته اعمال دستورات به موتورها کنیم
?ارسال داده ها از پایلوت به رادیو مثل سرعت …فشار ..داشته باشیم
?ارسال تصاویر دوربین
?ویا تلمتری
مشکل من : اینکه با توجه به آموزش های شما خیلی از امکانات این برد را مناسب دیدم
ولی بعضی از دوستان شکایت از سخت بودن چنج کردن آن داشتند؟
آیا میشه با استفاده ازنرم افزار برای mission planner
firmware
مخصوص نوشت که طبق عملکر ما کار کند و از امکانات اتوپایلوت مثل مدهای جی پی اس هم استفاده کند؟
خلاصه مهندس خیلی سردر گم شدیم
ممنون میشوم راهنمایی بفرمایید استفاده از چه برد و روشی معقول تر به موفقیت کار نزدیک می شویم ؟
با سلام خدمت شما دوست عزيز
فلايت كنترل APM يك فلايت كنترل Open Source مي باشد و شما مي توانيد تغييرات مورد نظرتان را روي اين برد پياده كنيد. يعني اينكه نرم افزار Mission Planner را در محيط Visual Studio باز مي كنيد و هر تغييري كه مد نظرتان است انجام مي دهيد و يا تمامي كدها و قابليت هاي ديگر. ولي ذكر اين نكته هم مهم است كه فلايت كنترل APM حاصل تغييرات زيادي توسط كاربران مختلف است كه به اينجا رسيده است و در صورتي كه قصد تغيير آن را داريد نياز است كه به طور كامل بر #C و ++C تسلط داشته باشيد و زمان كافي جهت انجام تغييراتي كه مد نظرتان است را داشته باشيد. در حال حاضر فلايت كنترلر هاي Open Source موجود كه اينجانب حضور ذهن دارم به صورت زير است:
1- KK
2- CC3D
4- APM و Pixhawk و خانواده Ardupilot
5- CC3D rev
6- Multiwii
7- Naze32
8- KISS
9- STM32F3 (از Aeroquad)
10- Paparazzi
11- Navio
12- Erle-Brain
مقايسه تعدادي از آنها را در كامنت هاي ديگر آورده ايم. به طور خلاصه اگر قصد داريد پروژه هاي پيچيده را انجام دهيد پيشنهاد ميكنم از اپن سورس هاي Raspberry Pi به جاي Arduino استفاده كنيد. يعني اينكه به جاي APM يا Pixhawk يا MultiWii از navio2 يا Erle-Brain به همراه Raspberry Pi استفاده كنيد. اگر هم پروژه پيچيده اي نيست بهترين انتخاب همان APM است. بحث پروژه ساده و پيچيده هم يك موضوع نسبي است كه هر كس تعريفي از آن دارد. دقت كنيد كه ما فقط روي قابليت ها بحث مي كنيم و با جريان مصرفي و قيمت و… كاري نداريم.
موفق باشيد.
با سلام و خسته نباشید خدمت استاد قاسمی عزیز و عرض خداقوت بابت تهیه و ارایه آموزش های خوبتون در خصوص UAV ها
بنده در حال انجام یک پروژه دانشگاهی هستم مبنی بر اعمال یک درجه آزادی (pitch) بیشتر به موتورهای کوادروتور . به عبارت دیگر موتورهای کوادروتور ثابت نیستن و قابلیت چرخش همانند هواپیماهای عمود پرواز دارن همانند کوادهای مسابقه (race) من دنبال معادلات دینامیک سیستم با این تغییر رو کواد هستم یه کارایی کردم ولی دچار کمبود اطلاعات هستم کمکی که لازم دارم اینه که:
– مقاله های آکادمیک در این زمینه رو از کجا تهیه کنم و کلید واژه یا نام این دسته از کوادها چیه
– بعد از به دست آوردن معادلات باید بحث پایداریش رو در نرم افزار متلب بررسی کنم که آموزش شبیه سازی اون رو می خوام
و یا کسی که بتونه تو این زمینه به من کمک کنه
زمان زیادی ندارم لطف کنید اگه می تونید سریع پاسخ بدید. ممنون
سلام جناب محمدی
مطلبی که بیان نمودید یک بحث کاملا تخصصی می باشد که در قالب یک کامنت و یک مطلب نیست. برای شروع هم پیشنهاد می کنم از مقاله زیر کمک بگیرید و هر جایی که مشکل داشتید بنده در خدمتم. کاری هم که قراره انجام بدید یک قسمتش مشابه معادلات داینامیک V22 می باشد که اگر دسترسی دارید کمک کننده می باشد.
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.193.4801&rep=rep1&type=pdf
موفق باشید.
سلام
مطالبی که قرار دادین بسیار عالی هستند .
تشکر و خسته نباشید.
با سلام خدمت شما دوست عزیز
از ابراز لطف جنابعالی سپاسگذاریم.
موفق باشید