جستجو برای:
سبد خرید
0
صفحه اصلی
رباتیک
مجموعه مطالب کوادکوپتر
دوره آموزشی ساخت اصولی ربات
هواپیمای مدل
ربات های پیشرفته
الکترونیک
دوره آموزشی الکترونیک مقدماتی
دوره طراحی PCB با Eagle
دوره تحلیل مدار الکترونیکی
آزمایشگاه الکترونیک
مکانیک
کارگاه مکانیک
برنامه نویسی
دوره آموزشی پایتون
دوره آموزش کامل آردوینو
حمایت مالی از سایت
ورود
نام کاربری:
perm_identity
رمز عبور:
lock_open
مرا به خاطر داشته باش
رمز عبور را فراموش کرده اید؟
هنوز عضو نشده اید؟
عضویت در سایت
robouavorg@:ارتباط با ما در تلگرام
ghasemghasemi86@gmail.com
perm_identity
سبد خرید
0
0
صفحه اصلی
رباتیک
مجموعه مطالب کوادکوپتر
دوره آموزشی ساخت اصولی ربات
هواپیمای مدل
ربات های پیشرفته
الکترونیک
دوره آموزشی الکترونیک مقدماتی
دوره طراحی PCB با Eagle
دوره تحلیل مدار الکترونیکی
آزمایشگاه الکترونیک
مکانیک
کارگاه مکانیک
برنامه نویسی
دوره آموزشی پایتون
دوره آموزش کامل آردوینو
حمایت مالی از سایت
ورود و ثبت نام
مطلب VIP
آموزش الکترونیک | برنامه نویسی | رباتیک
مطلب VIP
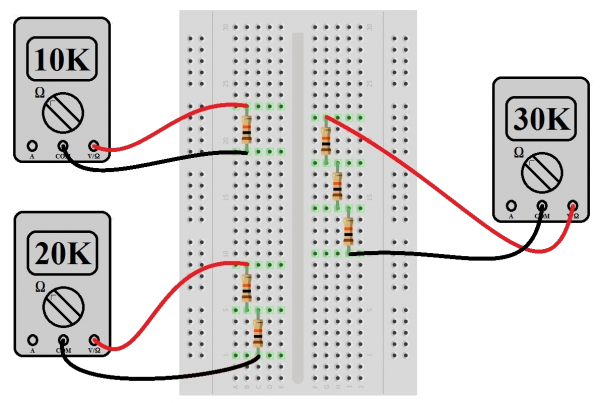
مدارهای سری و موازی به صورت عملی و آشنایی با ثابت زمانی (بخش دوم)
بیشتر بخوانید
موتورهای ربات {جلسه بیست و سوم}
بیشتر بخوانید
شتاب سنج چیست؟ آشنایی با شتاب سنج و نحوه عملکرد آن
بیشتر بخوانید
آنتن FPV {بخش هشتم}
بیشتر بخوانید
انواع آنتن FPV {بخش هفتم}
بیشتر بخوانید
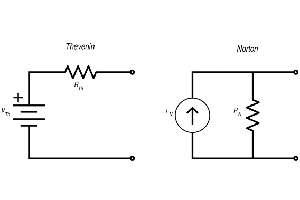
نظریه نورتون – (محاسبه مقاومت و منبع نورتون)
بیشتر بخوانید
نظریه تونن به زبان ساده
بیشتر بخوانید
import کردن ماژول ها در پایتون و روش های آن
بیشتر بخوانید
امکانات عینک FPV {بخش چهارم}
بیشتر بخوانید
1
2
3
…
11
keyboard_arrow_up
نقشه راه رایگان هوش مصنوعی و یادگیری عمیق
مشاهده