انواع موتورهاى براشلس {جلسه ششم}
مقدمه اى بر انواع موتورهاى براشلس
در بخش دوم موتورهاى براشلس قصد داريم در مورد انواع موتورهاى براشلس بحث كنيم و با ساختارهاى داخلى آنها آشنا شويم. براى آشنايى با موتورهاى براشلس و شناخت آنها جلسه پنجم را مطالعه كنيد:
کاربران محترم، خواندن اين جلسه بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
انواع موتورهاى براشلس
موتورهاى براشلس را به دو طريق دسته بندى مى كنند:
1-Inrunner و Outrunner
2-سنسوردار و بدون سنسور(Sensor VS Sensorless)
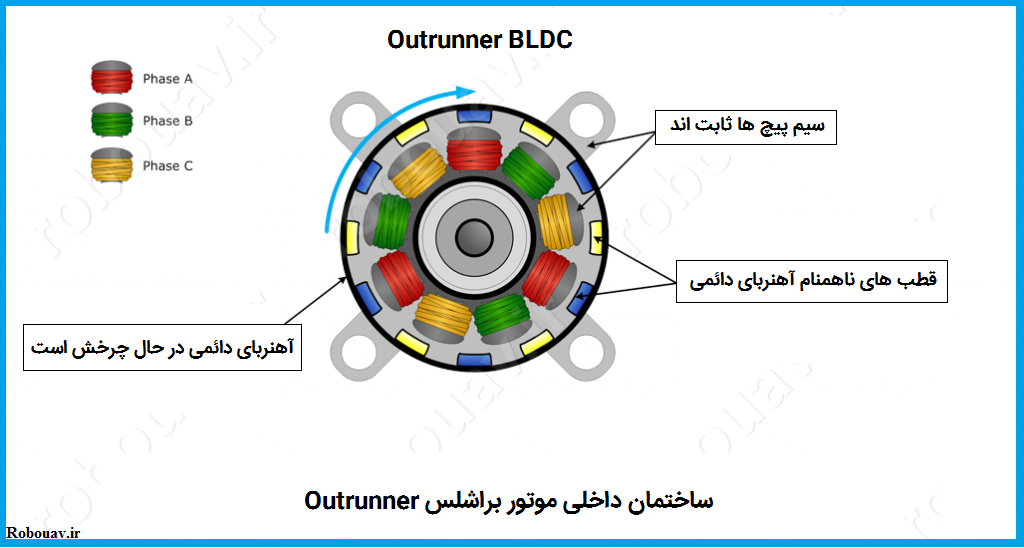
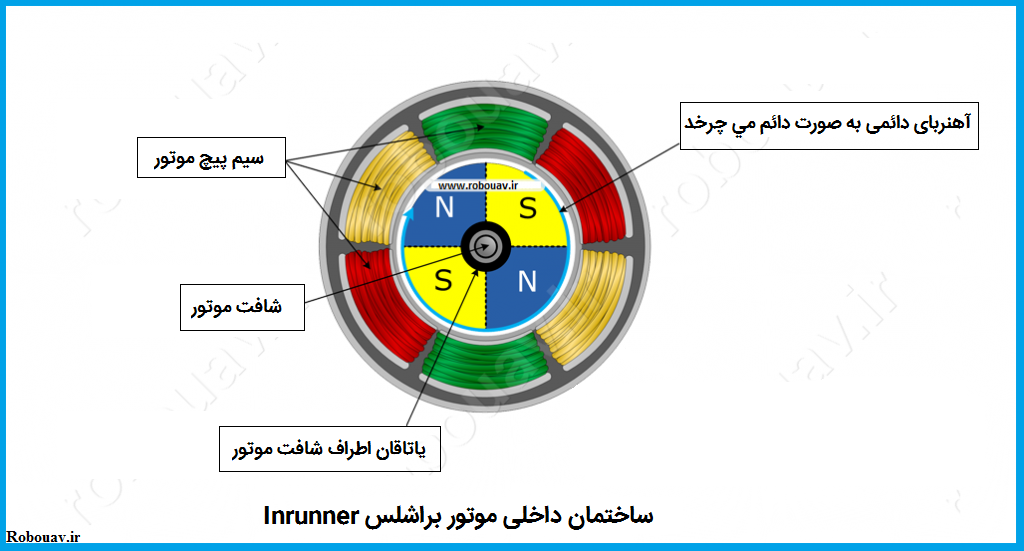
در دسته بندى نوع اول موتورهاى براشلس را به دو دسته اينرانر و اوترانر تقسيم مى كنند. نكته مهم این است که در تمام انواع موتورهاى براشلس چون جاروبک حذف شده پس قطعا سیم پیچ ثابت است و آهنربای دائمی همیشه نقش روتور را دارد. حال در موتورهای Inrunner که قسمت داخلی آن دوار است آهنربای دائمی در درون موتور میچرخد و استاتور در قسمت بیرونی ثابت است و در موتورهای Outrunner قسمت بیرونی موتور دوران می کند پس آهنربای دائمی در پوسته موتور در حال حرکت است و سیم پیچ در داخل موتور ثابت است. در شكل زير ساختمان داخلى يك موتور براشلس اوترانر نشان داده شده است.
[post_shop]
ولی در موتورهای Inrunner آهنربای دایمی در مرکز موتور به همراه شافت موتور در حال گردش است و سیم پیچ در قسمت بیرونی ثابت است و نقش استاتور دارد.
تفاوت موتورهاى براشلس Inrunner و Outrunner
- ارتفاع و ابعاد موتورهای Inrunner از Outrunner بیشتر است.
- دور موتور(rpm) موتورهای Inrunner بیشتر و گشتاور آن کمتر ازOutrunner است.
- Kv موتورهای Inrunner بیشتر از Outrunner است.
- موتورهای Inrunner معمولا نیاز به گیربکس جهت کنترل مناسب دور دارند.
- موتورهای Outrunner سروصدای کمتری نسبت به Inrunner گيربكس دار دارند.

لازم به ذکر است که تقریبا در بيشتر موارد از موتورهاىOutrunner استفاده می کنیم چون هم نیازی به گیربکس ندارد و هم سروصدای کمتری دارد، وزن آن هم به نسبت کمتر است، بازده بالاتری دارد. شکل زیر یک موتور براشلس اینرانِر به همراه گیربکس را نشان می دهد.

موتورهای براشلس رو اصطلاحا موتورهای سه فاز هم می نامند. دو تاسیم که برای جریان استفاده میشه و یکی هم برای فیدبک به کار برده می شود.
موتورهاى براشلس سنسوردار
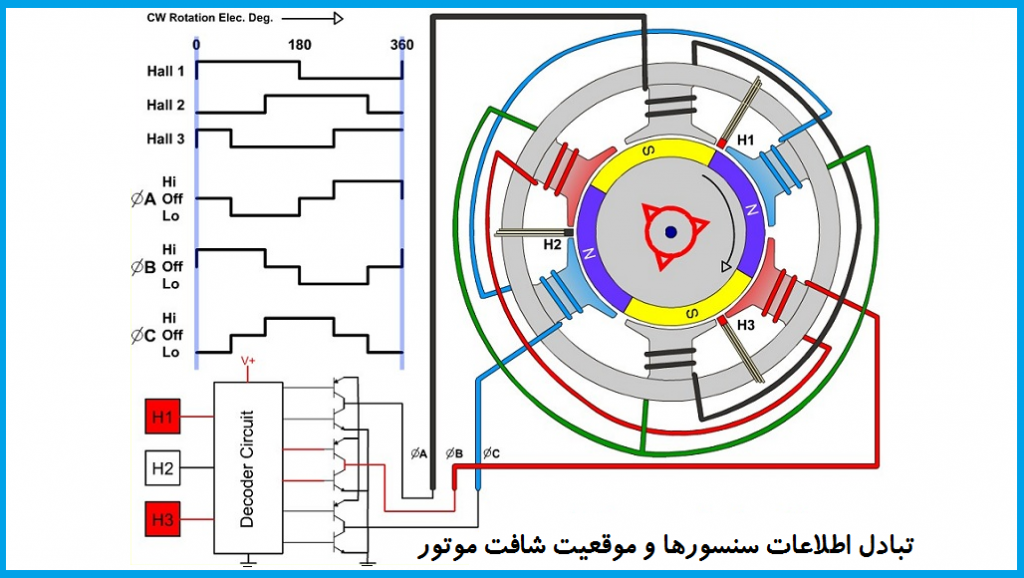
در موتورهای سنسور دار از نوعی سنسور هال با خروجی آنالوگ یا دیجیتال جهت تعیین دقیق موقعیت شفت استفاده می شود. این سنسورها را به شکل مختلفی می توان یافت که در شکل های زیر مشاهده می کنید.

و نمونه ديگر به صورت SMD:

بعد از دریافت اطلاعات موقعیت موتور این سنسورها اطلاعات را به دیکدر ارسال می کنند تا به میکروکنترلر ارسال گردد.
شاید این سوال در ذهنتان باشد که دیگر نیازی به موتورهای سنسوردار نیست وقتی موتورهای بدون سنسور کار میکنند؟
دلیل استفاده از سنسور کارکرد نرم تر در هنگام اوج گرفتن كوادكوپتر مى باشد. در هنگام شروع سنسورها با تشخیص دقیق محل روتور شروع بسیار خوبی را دارند. همچنین اگر ملخ به جایی گیرکنه یا اتفاقی برای ربات بیفته سنسورها متوجه میشوند و از خرابی موتور جلوگیری میکنند و باعث توقف موتورها مى شوند.
و اما در انواع موتورهاى براشلس سنسوردار و بدون سنسور به دلیل کار راحتر با موتورهای بدون سنسور و ارزان تر بودن از آنها استفاده می کنیم.
سیم پیچ های داخلی موتورهای براشلس هم معمولا بصورت ستاره ای می بندن چون هم آسونتره و هم سیم پیچی کمتر نسبت به اتصال دلتا دارد. هرچند دور موتور در اتصال ستاره کمتر از مثلثی است.
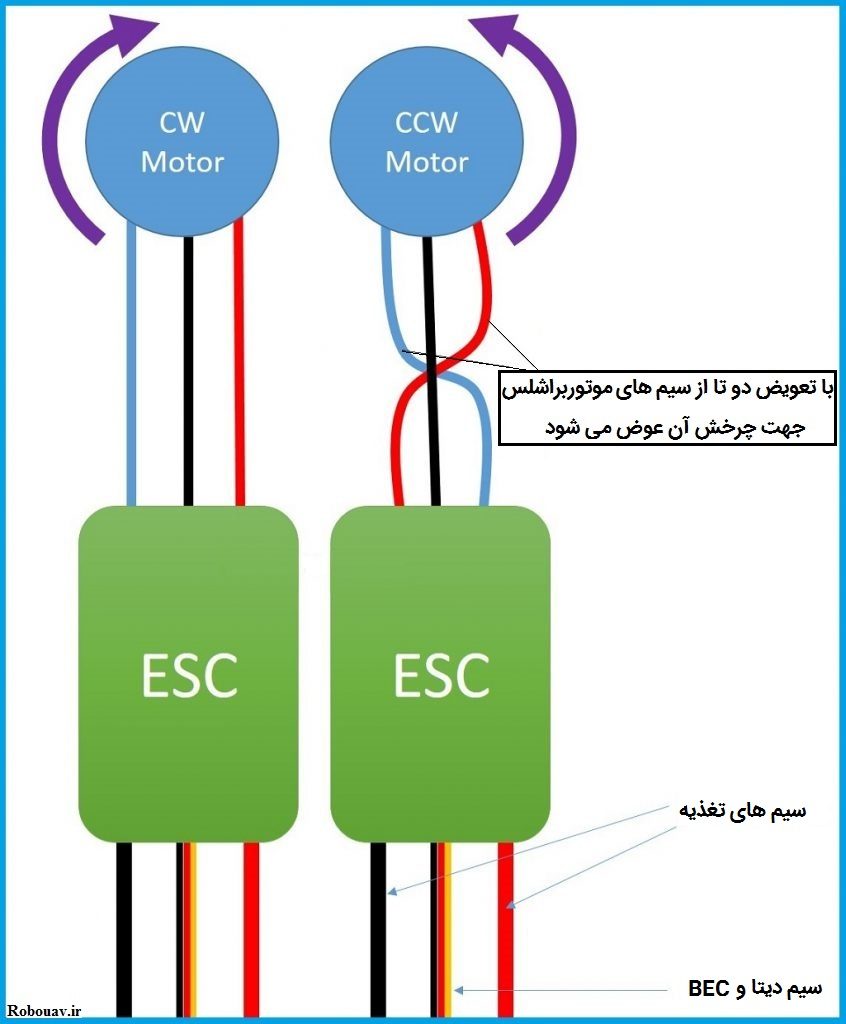
تعيين جهت چرخش موتورهاى براشلس
برای برعکس چرخیدن یک موتور براشلس کافیه فقط جای دوتا سیم متصل به موتور را عوض کنید. هيچ فرقى هم نمى كند كدام يك از دو سيم را با هم تعويض كنيد.
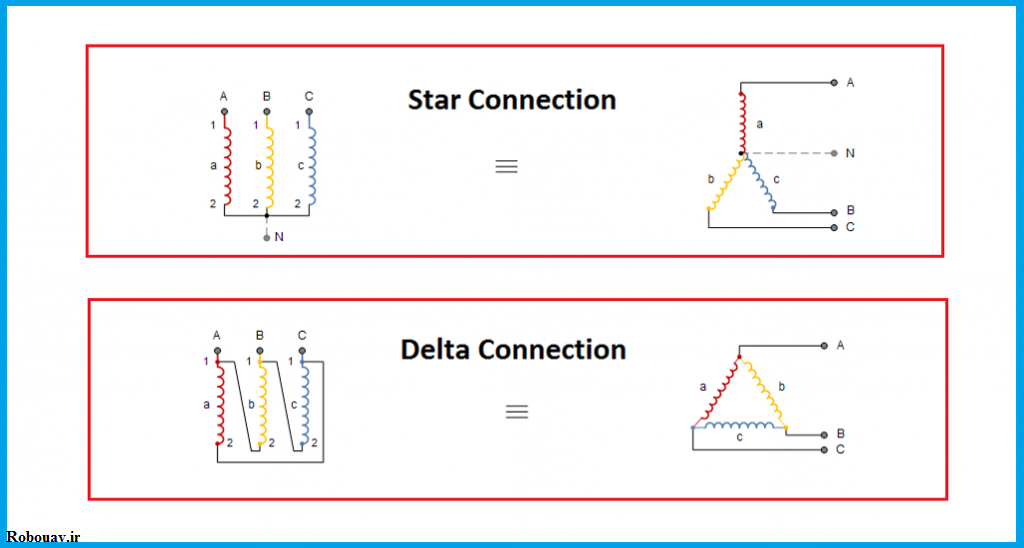
اتصال سيم پيچ استاتور به صورت ستاره و مثلث
سیم پیچ های استاتور انواع موتورهاى براشلس را به دو صورت می پیچند که هر کدام ویژگی های خاص خود را دارد. در زیر نمای کلی از این دونوع سیم پیچی را ملاحظه می کنید.
در صورتی که به درون پوسته موتور نگاه کنید و یا اینکه پوسته آن را باز کنید مشاهده می کنید که اتصال مثلثی به صورت سه مجموعه سیم است که هرکدام به یک اسپیدکنترل وصل میشود و هرکدام از این سه مجموعه خود ترکیبی از مثبت و منفی است که به صورت دوتایی است. به شکل زیر دقت کنید.

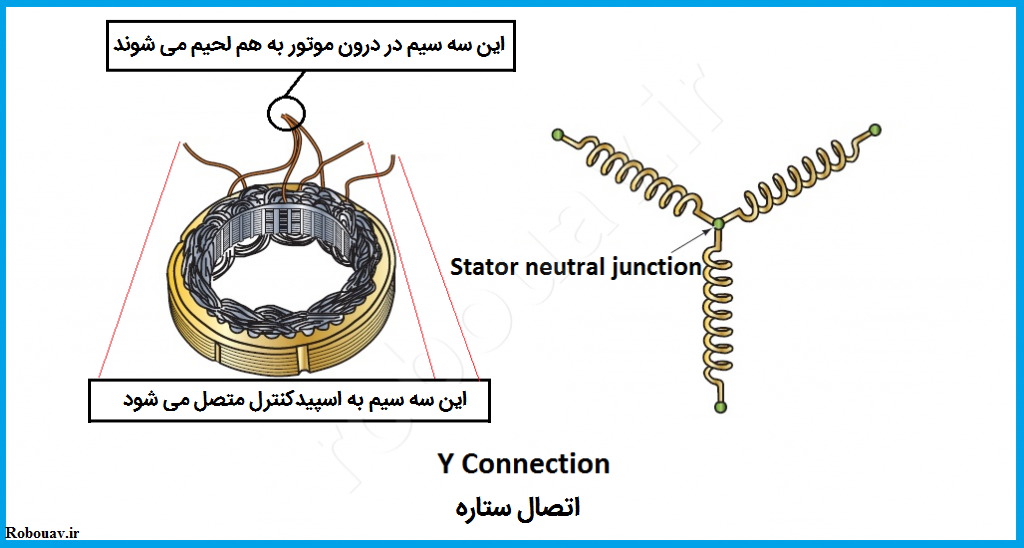
در اتصال سیم پیچ ها به صورت ستاره فقط سه مجموعه سیم مجزا داریم و سه تای دیگر هم به هم لحیم می شوند که نقطه خنثی مربوط به اتصال ستاره ای است.
تفسیر شماتیکی شکل های بالا به صورت زیر است.
به طور کلی در انواع موتورهاى براشلس با اتصال ستاره بازده بالاتری نسبت به موتورهای با اتصال مثلث دارند. همچنین Kv موتورها با اتصال ستاره 1.73 کمتر از همان نوع موتور با اتصال مثلث است ولی گشتاور اتصال ستاره 1.73 بیشتر از اتصال مثلث است. مثلا اگر موتوری با اتصال ستاره دارای Kv=1000 باشد همین موتور با اتصال مثلث دارای Kv=1000*1.73 که معادل 1730 است می باشد. در اتصال ستاره سه تا سیم مثبت در یک نقطه به هم متصل شده اند و سه تا سیم منفی به سمت اتصال با اسپیدکنترل می روند. در اتصال مثلث سیم مثبت از هر مجموعه سیم ها به سیم منفی از مجموعه بعدی متصل می شود و هرکدام از این مثبت و منفی ها یک فاز را تشکیل می دهند که در مجموع سه فاز می شود.
[/post_shop]
در زیر هم چندتا از شرکت های تولید کننده انواع موتورهاى براشلس را مشاهده می کنید.
1-Hacker
2- T-motor
3-Turnigy
4-Emax
5-KMS
6-E-Flite
برای دریافت آخرین مطالب سایت و همچنین مطالب منحصر به فرد دیگر که در سایت منتشر نمی شوند میتوانید در کانال تلگرام ما عضو شوید و یا در اینستاگرام ما را فالوو کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
210 بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
483 بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
231 بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
214 بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
287 بازدید
56 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
سلام
من میخوام موتور برای ربات انسان نما انتخاب کنم که به جای موتور های داینامیکسل استفادش کنم.
سرعت برام مهم نیست و بیشتر بازده و گشتاور و بازه ی ولتاژ اهمیت داره.
براشلس ها کدومشون بهتره که به جای داینامیکسل استفاده کنم؟
سلام و احترام
در مورد گشتاور و دیگر پارامترهای موتورهای براشلس در جلسات توضیح داده شده است. منظورتان از براشلس ها برند موتور می باشد یا نوع موتور یا…؟
در حال حاضر من از سروو داینامیکسل استفاده میکنم و میخوام اولا بدونم براشلس هست یا نه و اینکه از کجا بفهمم؟
دوم اینکه اگر براش باشه با توجه به گشتاور و سرعت و بازده بیشتر براشلس بهتر هست برم سمت براشلس یا خیر؟
سلام و احترام
مقایسه این دو در قالب یه کامنت نمی گنجند و سعی می کنیم در جلسات آموزشی رباتیک به طور کامل به شرح این دو بپردازیم.
موفق باشید
سلام اقای مهندس ممنون از مطالب مفیدتان
من یک موتور هارددیسک را مستقیما بامیکرو راه اندازی کردم و سرعت متغییر هم عمل میکنه اما وقتی این موتور را بام تور براشلس دیگه ای جایگزین میکنم را نیم افتد حتی با تنظیم تاخیر بین پالسها هم کار نمیکند مشکل از چیست؟
سلام و احترام
لطفا اطلاعات موتوری که راه اندازی نموده اید و همچنین موتور براشلس تان را ارسال کنید و نحوه تغذیه آن را نیز ذکر نمائید.
سلام و احترام .ممنون بابت مطلب کاملتون.یک سوالی داشتم خدمتتون.اگر بخواهیم تعداد دوری (عدد صحیح مثلا یک دور ، دو دور و ..)که موتور می چرخد را به دست اوریم ، می توانیم تعداد یک شدن تنها یکی از سنسورهای هال را با استفاده از میکرو بشماریم ؟…ممنون
سلام جناب حسيني
با استفاده از سنسورهاي هال به راحتي مي توان تعداد دوري كه يك موتور مي زند را بدست آورد. همانطور كه خودتان نيز بيان نموديد با شمردن تعداد يك شدن هاي سنسور مي توان RPM مورد نظر را محاسبه نمود. البته دقت كنيد كه سنسورهاي هال به دو دسته ديجيتال و آنالوگ تقسيم مي شوند و بسته به نوع سنسوري كه استفاده مي كنيد با استفاده از ديتاشيت مربوطه بايد عمل نمود.
موفق باشيد
سلام ..سپاس بابت توضیحات کاملتان…سوالی مبتدیانه درمورد موتورهای براشلس سنسوردار داشتم.اگر بخواهیم در این نوع موتور ها فقط سرعتشان را کنترل کنیم(نیازی به کنترل موقعیت نباشد) میتوانیم سنسورهای هال را بدون اتصال باقی بگذاریم(به میکرو متصل نکنیم)..سپاس فراوان
سلام و احترام
موتورهاي براشلس سنسور دار معمولا داراي 5 يا 6 سيم مخصوص سنسور هستند و 3 سيم هم براي اتصال به تغذيه هر فاز دارند. در صورتي كه شما اين 5 يا 6 سيم سنسوره را متصل نكنيد و از يك اسپيدكنترل معمولي هم استفاده كنيد موتور به راحتي مي چرخد و مشكلي بابت چرخش آن نداريد. در بين موتورهاي براشلس سنسوردار داراي 5 سيم سه سيم آن مربوط به سه سنسورهاي هال مي باشد و دو سيم هم مربوط به تغذيه مثبت و منفي است و در براي موتورهاي براشلس داراي 6 سيم هم سه سيم مربوط به سنسورهاي هال مي باشد و دو سيم هم مربوط به تغديه مثبت و منفي است و يك سيم هم مربوط به سنسور دما مي باشد كه در متن درس به آن اشاره شد.
موفق باشيد
خیلی خیلی سپاسگزارم مهندس قاسمی …پس در واقع اگر نخواهیم موقعیت موتور را کنترل کنیم ، با موتور سنسور دار مثل همان بدون سنسور عمل می کنیم
سلام مجدد
بله همین طور است. برای راه اندازی موتورهای سنسوردار هم هر کجا به مشکل بر خوردید بنده در خدمتم.
موفق باشید
خیلی ممنون بابت لطفتون اقای قاسمی بزرگوار
خواهش مي كنم جناب باقري مهر
با ارزوي موفقيت