آشنایی با استپرموتور و انواع آن{جلسه بیست و هفتم}
مقدمه
استپرموتور یک نوع موتور براشلس دی سی(BLDC) است که به صورت پله ای حرکت میکند. این موتورها برای جاهایی کاربرد دارند که به موقعیت و سرعت خاصی نیاز داریم مخصوصا برای مکان هایی که نیاز به سرعت کم باشد. بیشترین کاربرد آنها در پرینترهای سه بعدی می باشد.
مزایای استپرموتورها:
- گشتاور بالا در سرعت های کم
- ارزان بودن
- حلقه باز بودن
معایب استپر موتورها:
- کاهش گشتاور در سرعت های بالا
- مصرف بالا
البته برای رفع عیوب احتمالی و افزایش دقت زیاد، استپرموتورهای با کنترل حلقه بسته نیز در بازار موجود می باشد.
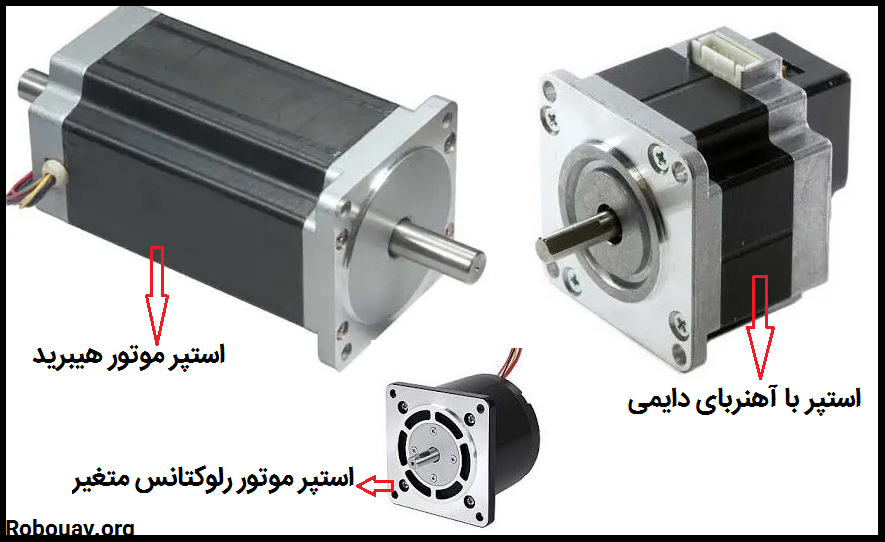
استپر موتورها بر حسب آهنربای داخل روتور آنها به سه نوع تقسیم می شوند:
- استپر با آهنربای دایمی(Permanent Stepper Motor)
- استپر رلوکتانس متغیر(Variable Reluctance Stepper Motor)
- استپر موتور هیبرید(Hybrid Stepper Motor)
در شکل زیر نیز نمونه دیگری از یک استپرموتور رلوکتانس(مقاومت مغناطیسی) متغیر ساخت شرکت سینگر را مشاهده میکنید.
به طور معمول بیشتر از استپرموتور هیبرید استفاده می شود.
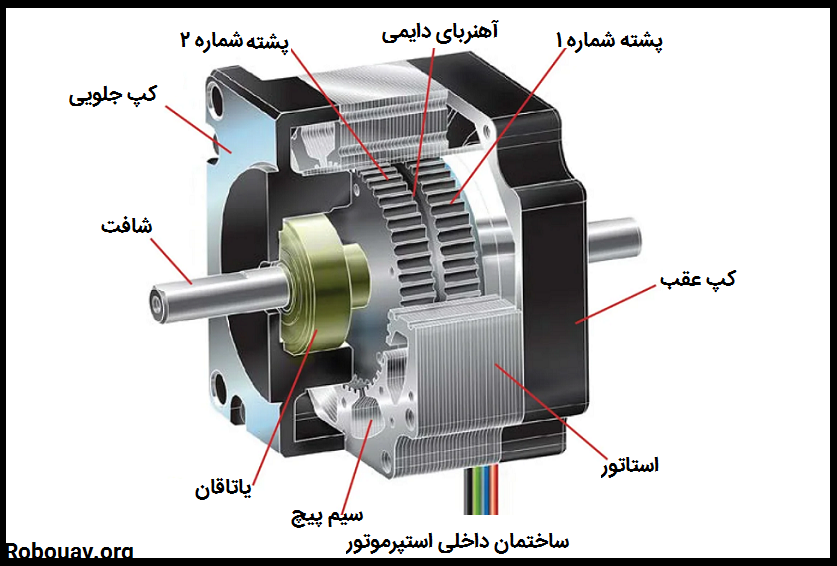
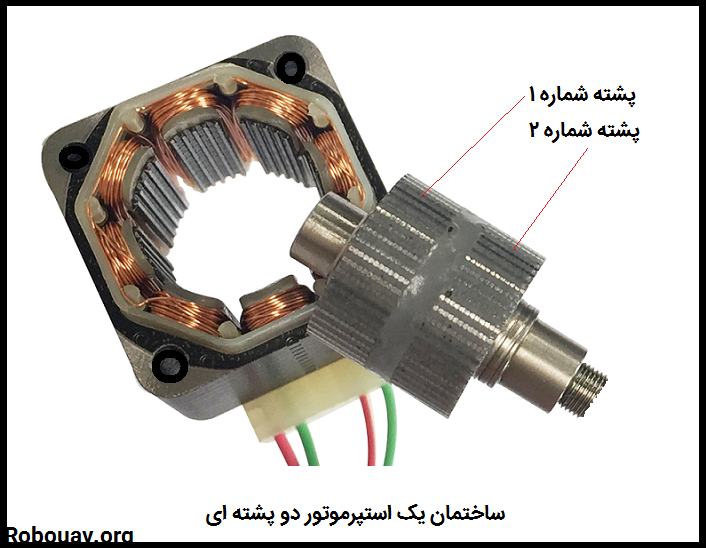
ابتدا نمایی از ساختمان داخلی یک استپر موتور دو پُشته(یا دو استک) را ببینید:
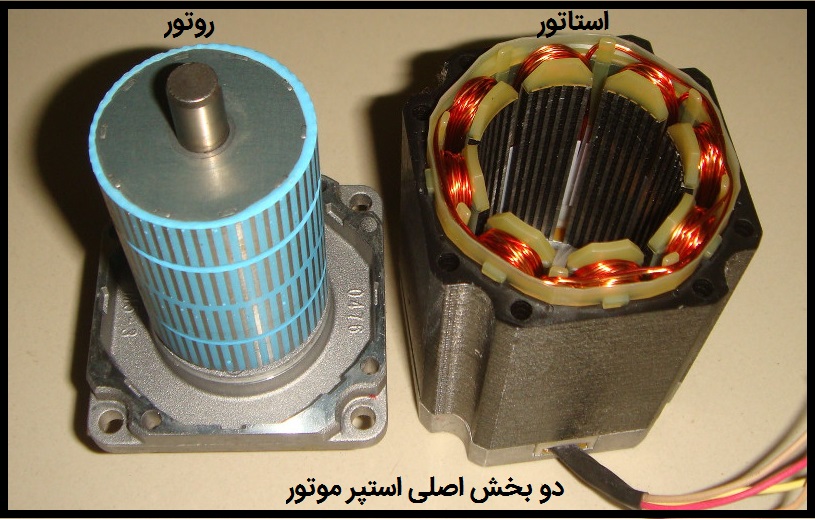
هر استپر موتور از دو بخش اصلی تشکیل می شود:
- استاتور
- روتور
ساختمان روتور یا همان آهنربای دایمی در استپرموتور ها متفاوت است و از یک نوع به نوع دیگر فرق می کند. در هر استپرموتور تعدادی از این ها وجود دارد که با نام استک(stack) یا پُشته شناخته می شوند. این پشته ها در هر موتور متفاوت است مثلا:
- استپر موتور تک پُشته ای
- استپر موتور دو پُشته ای
- استپر موتور سه پُشته ای
- استپر موتور چهار پُشته ای
در شکل زیر یک استپرموتور دو پُشته ای یا دو استک را مشاهده می کنید:
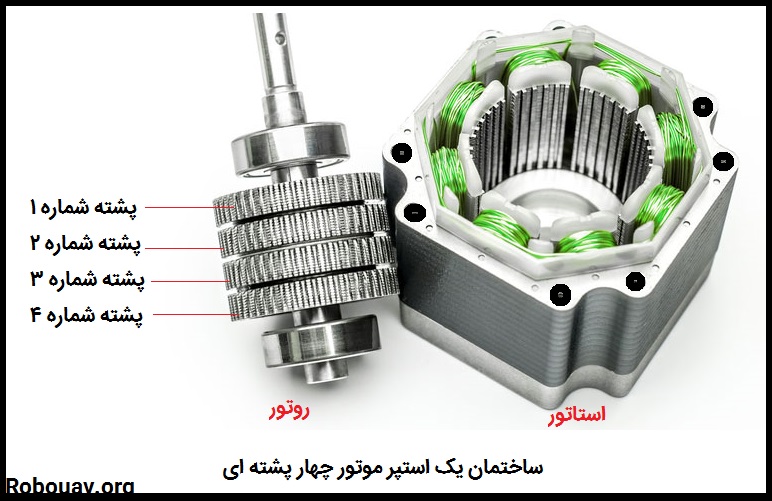
در شکل زیر نیز یک استپرموتور چهار استک یا چهار پشته را مشاهده می کنید:
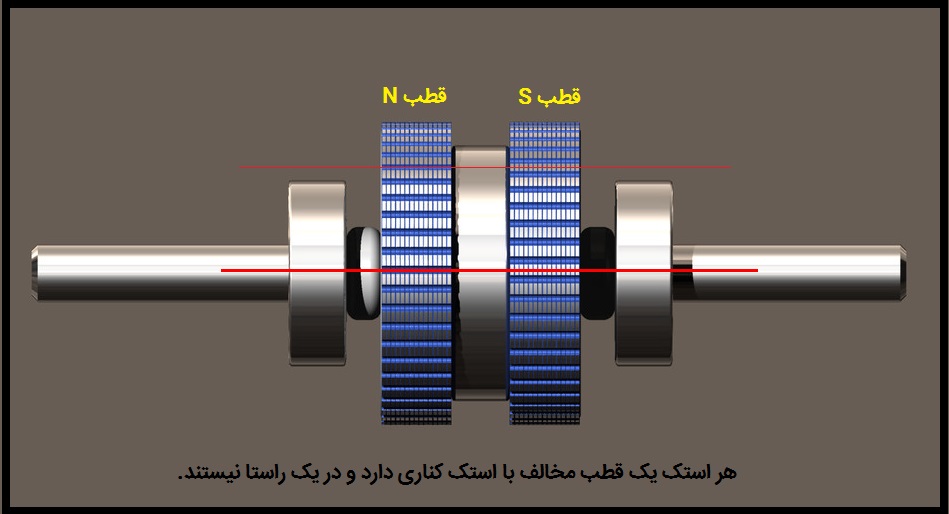
هر استک یا پُشته در استپر موتور یک قطب است یعنی یا نوع N است و یا نوع S:
حال اگر تعداد استک های افزایش یابد به همین ترتیب یک در میان قطب ها عوض می شوند. قاعدتا هرچه زاویه استپر کوچکتر باشد تعداد استک ها نیز افزایش می یابد.
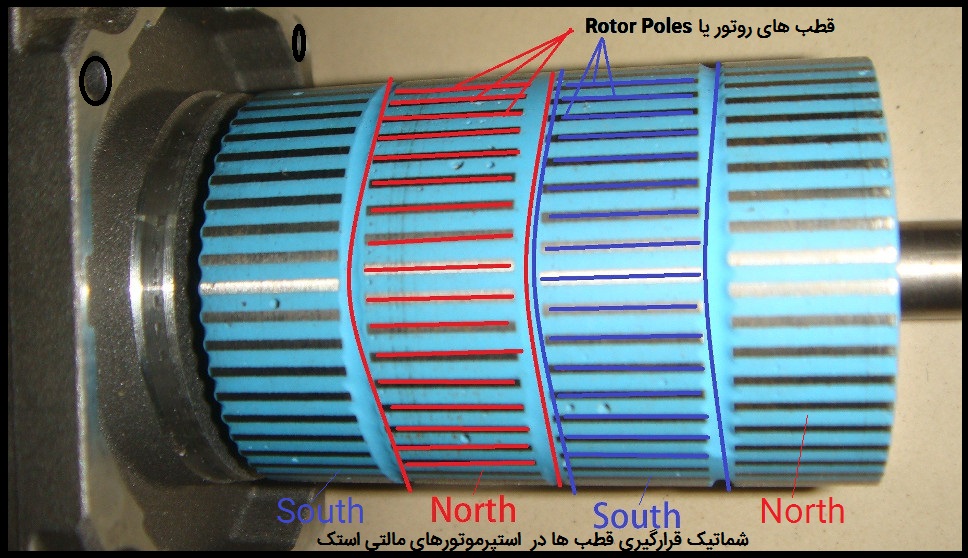
اگر تعداد استک ها زیادتر شود باز هم قطب های مخالف هم دارند و در یک راستا نیز نیستند. در شکل زیر نمای داخلی یک استپرموتور دو استک را مشاهده می کنید که بزرگنمایی شده است:
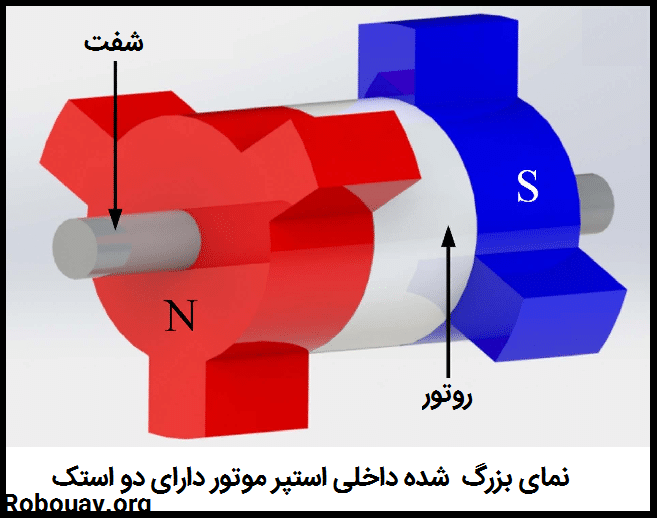
معمولا از دو استک برای استپرموتورها استفاده می شود و رایج ترین زاویه استپ هم 1.8 درجه است.
استپرموتورها از لحاظ حرکتی به سه نوع تقسیم می شوند:
- Full Step
- Half Step
- Micro Step
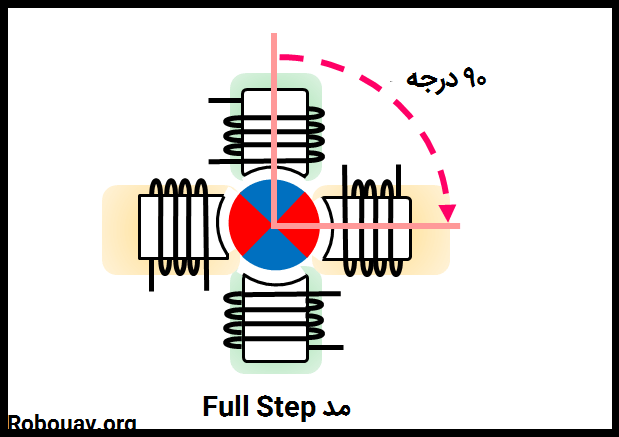
در نوع “Full Step” از یک سیم پیچ تا سیم پیچ بعدی با یک بار حرکت انجام می شود. در شکل زیر یک استپرموتور نوع فول استپ و تک فاز (Full Step Single phase)را مشاهده می کنید.
در نوع Micro Step با توجه به تعداد قطب ها و فازهایی که موتور دارد به زاویه های کوچکتر می چرخد مثلا 10 درجه. فرض کنید قصد داریم یک استپرموتور 10 درجه ای داشته باشیم برای این منظور می بایست 360/10 که معادل 36 استپ می باشد تنظیم کنیم. سه درجه رایج و استاندارد که زیاد استفاده می شوند عبارتند از: 0.9-1.8-3.6 درجه
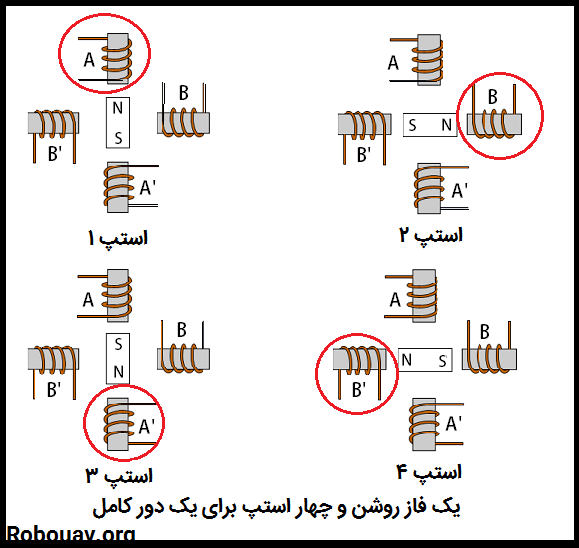
منظور از فاز در استپر موتورها تعداد حالت های آهنربایی شدن سیم پیچ ها است. مثلا در شکل زیر یک استپرموتور تک فاز را مشاهده می کنید که در چهار استپ یا گام می تواند یک دور کامل بزند. یعنی با هر بار سیگنال روشن شدن یک فاز موتور 90 درجه می چرخد. دایره های قرمز به معنای روشن شدن همان سیم پیچ در استپ مورد نظر می باشند. تعداد دایره های قرمز نشان دهنده تعداد فازهاست. در شکل زیر یک استپرموتور نوع فول استپ و تک فاز (Full Step Single phase) و البته تک قطبی را مشاهده می کنید.
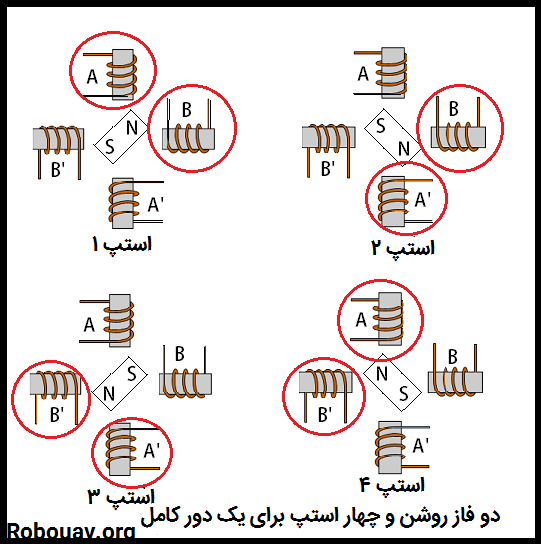
در شکل زیر نیز یک استپرموتور دو فازی را مشاهده می کنید که با استفاده از روشن شدن دوفاز و در چهار استپ یک دور کامل می زند. البته زاویه چرخش باز هم 90 درجه است ولی با استفاده از دو فاز این کار انجام شده است. در شکل زیر یک استپرموتور نوع فول استپ و دو فاز (Full Step Dual phase) و البته دو قطبی را مشاهده می کنید.
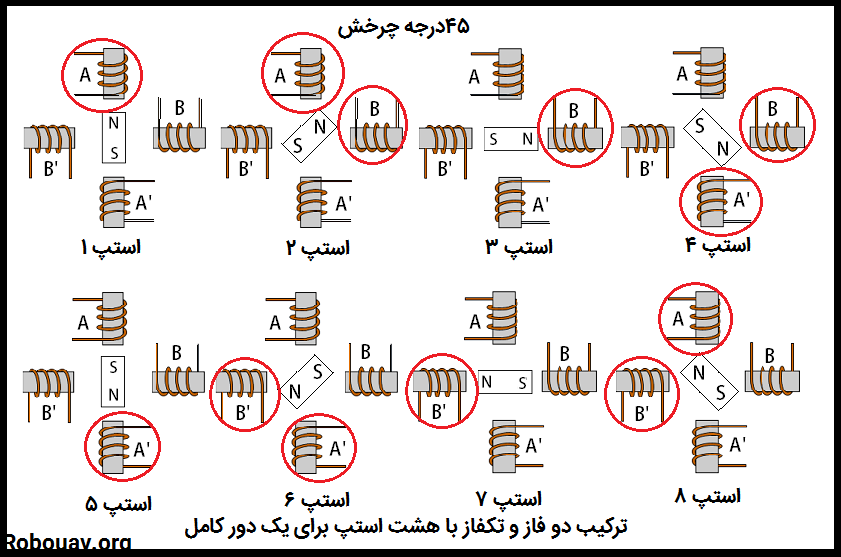
در شکل زیر نیز یک استپرموتور ترکیبی را مشاهده می کنید که با ترکیب یک فاز و دو فاز در هشت استپ یک دور کامل می زند با هر بار سیگنال یک چرخش 45 درجه ای داریم که باعث می شود در هشت گام یک دور کامل بزند. اصطلاحا “Half Step” نامیده می شود.
تعداد سیم های خروجی
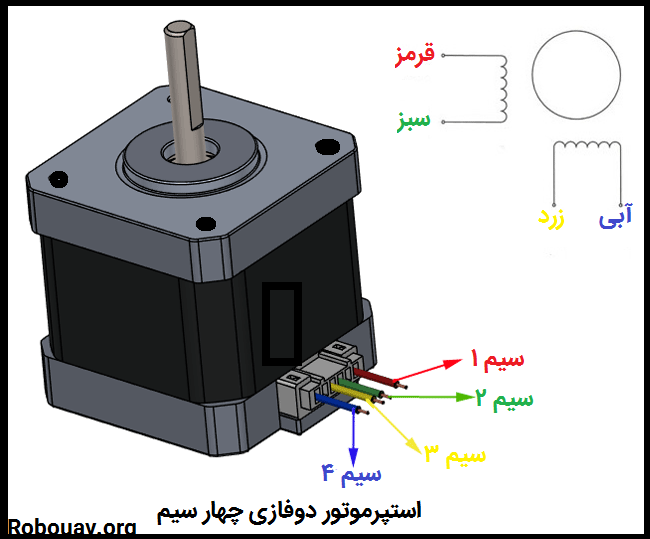
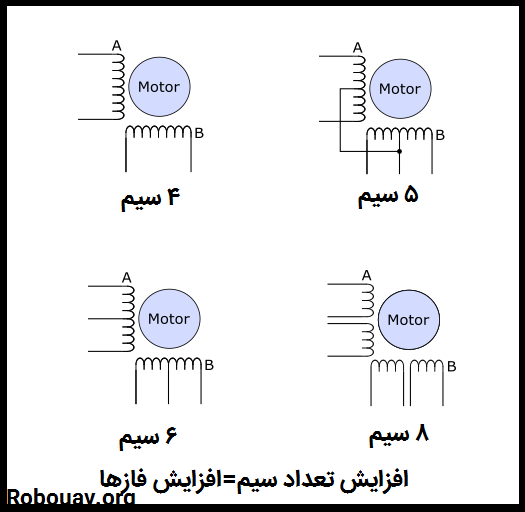
معمولا تعداد 4 یا 5 یا 6 یا 8 عدد سیم در انتهای موتور وجود دارد که بسته به تعداد فازهای استپر موتور تغییر میکنند.
هر چه تعداد فازها بیشتر شود تعداد سیم ها نیز بیشتر می شود زیرا هدف از اتصال سیم ها راه اندازی فازها است. هر چه فازهای بیشتری راه اندازی شود سیم پیچ های الکترومغناطیسی که در داخل موتور وجود دارد افزایش می یابد و کنترل و دقت نیز افزایش می یابد.
برای اتصال سیم ها ابتدا باید رنگ هر سیم و اینکه مربوط به کدام سیم پیچ می باشد را شناسایی کنیم. در صورتی که از دیتاشیت استفاده می کنید دیگری نیازی به استفاده از روش های دیگر نیست ولی در صورتی که دیتاشیت استپرموتور را ندارید می توانید از روش زیر استفاده کنید. نکته اصلی این است که هر سیم پیچی یک مقاومت ناچیزی در درون خودش دارد و با استفاده از این تکنیک می توانیم دو سر سیم پیچ ها را تشخیص دهیم:
- ابتدا یک سیم را به صورت تصادفی به عنوان نقطه شروع انتخاب می کنیم.
- سپس یک سیم دیگر را انتخاب کنید و مقاومت دو سر سیم های انتخاب شده را اندازه گیری کنید(اهم متر را در حالت مینیمم قرار دهید.0تا200 اهم)
- چنانچه عدد 1 نمایان شد بدین معنی است که این دو سیم به هم متصل نیستند و مربوط به یک سیم پیچ نیست.
- اگر فرض کنیم مقاومت سیم پیچ A-B عدد 2R باشد با اتصال سر A و COM مقاومت R بدست می آید.
البته تکنیک فوق برای موتورهای استپر 5 سیمه کاربرد ندارد و می بایست ابتدا COM را پیدا کنید و سپس ادامه مراحل را انجام دهید.
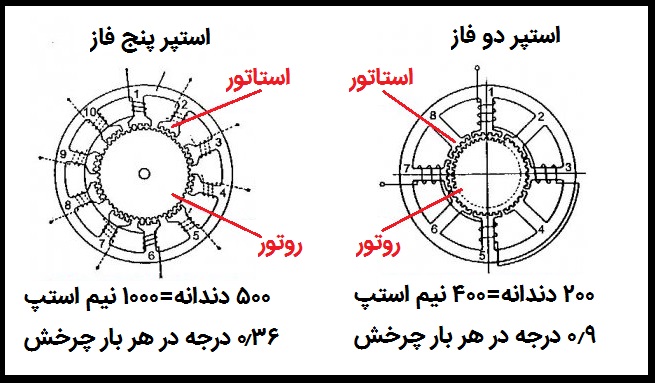
تاثیر تعداد فاز در استپرموتور
قاعدتا با افزایش تعداد فازها دقت و سرعت در عمل افزایش می یابد. استپرموتورها در مدل ها دو یا سه یا پنج فازی ارایه می شوند که در مدل های پنج با توجه به تعداد بالای فازها می توان در مواردی که به سرعت و دقت بالا نیاز داریم استفاده کنیم زیرا در مدل دو فازی احتمال لرزش در سرعت بالا وجود دارد و دقت کم می شود. البته با استفاده از روش های مکانیکی می توان این لرزش ها را کاهش داد.
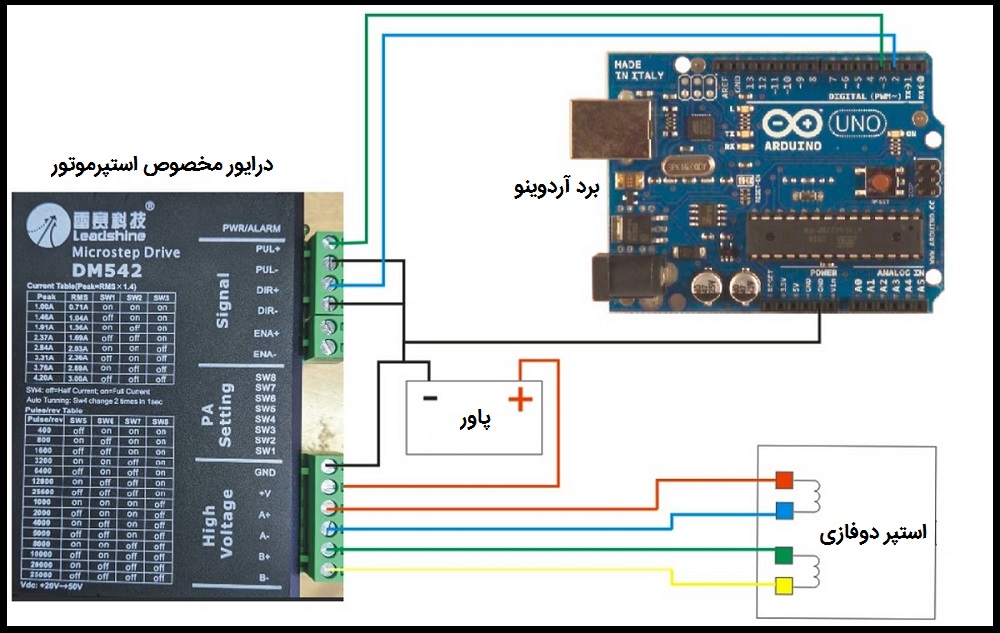
برای راه اندازی هر استپرموتور نیاز به درایور مخصوص استپر داریم که در یک جلسه جداگانه در مورد درایورها صحبت میکنیم. در شکل زیر نمونه ای از این درایورها را مشاهده می کنید.
دوستان عزیز بیشتر دوره های مربوط به این وب سایت رایگان می باشد. در صورت تمایل می توانید به اندازه وسع مالی خود(هر چند ناچیز) جهت پرداخت هزینه های نگهداری وب سایت از ما حمایت کنید:
این جلسه نیز به پایان رسید. برای دریافت آخرین مطالب سایت و همچنین مطالب دیگر که در وب سایت ما منتشر نمی شود می توانید ما را در اینستاگرام و تلگرام دنبال کنید.
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.19k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
15.12k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.42k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.01k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
1.51k بازدید
دیدگاهتان را بنویسید