مولتی روتور و انواع آن{جلسه اول}
مقدمه اى بر مولتی روتور
مولتی روتور به ربات هاى پرنده اى گفته مى شود كه با استفاده از چند موتور مى تواند يك پرواز پايدارى را براى شما فراهم سازد. در ادامه با تك تك مولتى روتورهاى ساخته شده آشنا مى شويم.
کاربران محترم، خواندن جلسه مولتی روتور بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
Singlecopter OR Coaxcopter
سینگل به معنای یک می باشد. این پرنده فقط دارای یک موتور است. البته سينگل كوپتر را قاعدتا نبايد جزو مولتي روتورها حساب كنيم چون لفظ مولتي روتور به معناي تعداد دو يا بيشتر از دو موتور است ولي براي كامل شدن مجموعه در بعضي موارد آن را جزو اين گروه حساب مي كنند.كنترل سينگل كوپتر هم با استفاده از تيغه هاي انتهایی آن است که به وسیله سروو موتورها کنترل می شود. تعداد سروو موتورها به نوع طراحی تیغه هایی که در انتهایی آن قرار داده می شود بستگی دارد. اين پرنده به دلیل اینکه ناپایداری زیادی دارد کمتر مورد توجه است ولی به دلیل اینکه دارای یک موتور براشلس است زمان استفاده از باتری افزایش می یابد و زمان بسیار زیادی را می توان در هوا پرواز نمود به همین دلیل برای مقاصد خاص می توان از این نوع پرنده بهره گرفت. ویدیوی طراحی سینگل کوپتر را می توانید از اینستاگرام ما دنبال کنید.

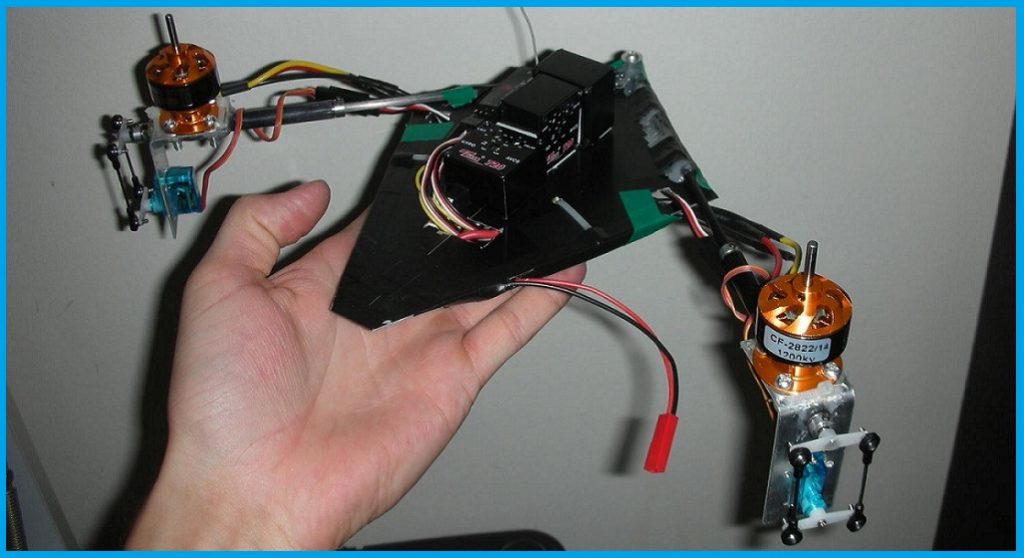
Twincopter OR Bicopter OR Dualcopter
دوال به معنای دو می باشد. همچنين اين پرنده را باي كوپتر نيز مي نامند. این پرنده دارای دو موتور می باشد که به شکل های مختلف و با استفاده از سرووها حرکات مختلف آنها به اجرا در می آید. به طور کلی دو سروو موتور در قسمت انتهایی هر بازو استفاده می شود که در قسمت زیرین موتورهای براشلس قرار می گیرد.در زیر نمونه ای از این پرنده را مشاهده می کنید. اجزای تشکیل دهنده دوال روتور عبارتند از:
- دو عدد موتور براشلس
- دو عدد سروو موتور
- بدنه
- فلایت کنترلر
- دو عدد اسپید کنترل
- باتری
- دو عدد ملخ
- دو عدد سروو موتور
دوال کوپتر نیز به دلیل اینکه از دو موتور براشلس بهره می گیرد از زمان پرواز مناسبی برخوردار است و به دلیل پایداری بیشتر نسبت به سینگل کوپتر و عمر بیشتر باتری نسبت به کوادکوپتر و بقیه مولتی روتورها استفاده می شود.
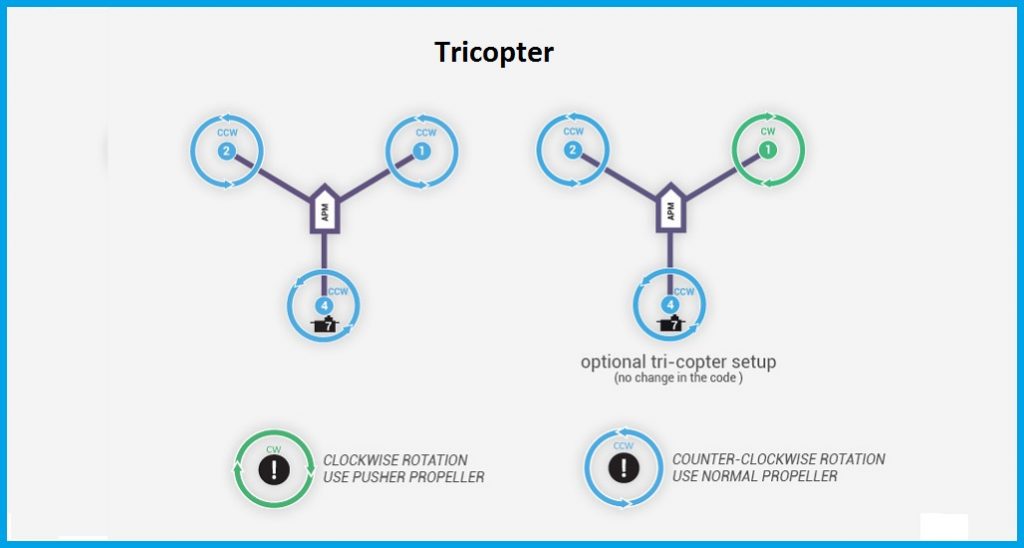
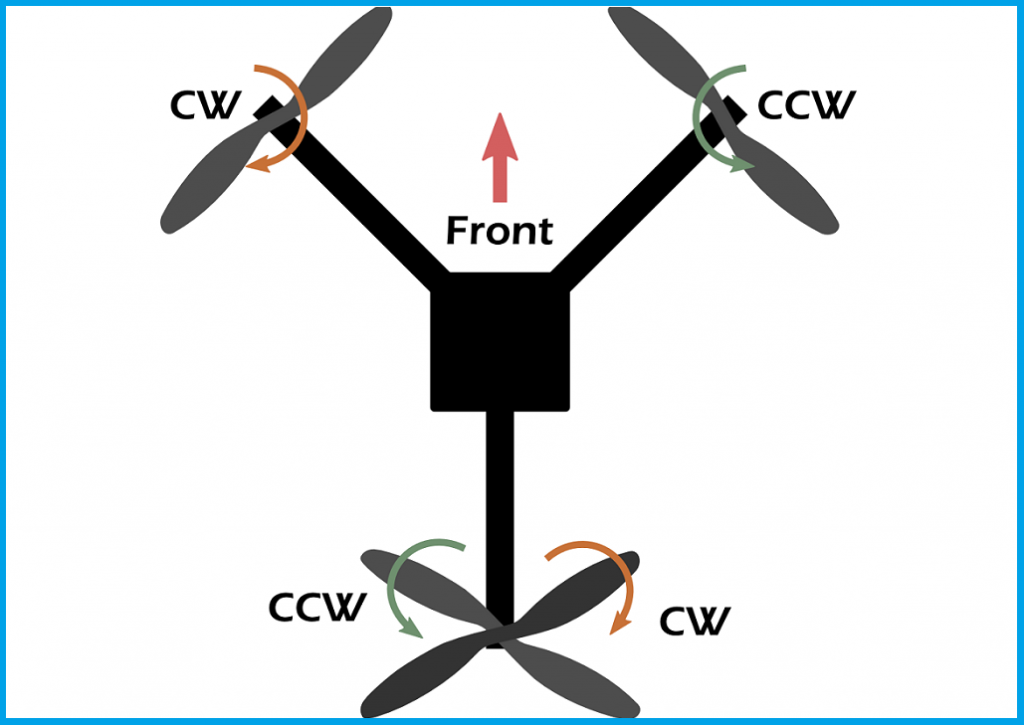
Tricopter

تری به معنای سه می باشد. سه عدد موتور بر روی این مولتی روتور نصب می شود.
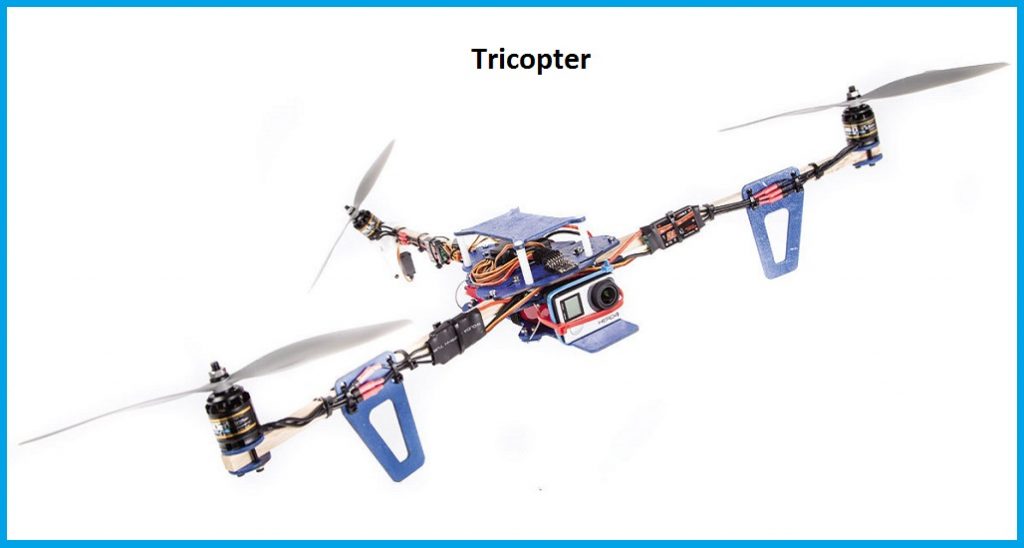
یک سروو موتور در انتهای آن وجود دارد که جهت چرخش ربات استفاده می شود. در شکل فوق مشاهده می کنید که یکی از موتورها به سروو متصل است.
Quadcopter OR Quadrotor
به معنی پرنده ایه که چهار تا موتور داره. کواد به معنی چهار می باشد . ساخت کوادکوپتر بسیار آسان تر از بقیه موارد است و از محبوبیت خاصی برخوردار است.به این پرنده کوادروتور هم میگویند. کوادروتور در دسته روتورکرافت ها(rotorcraft) می باشد که نقطه مقابل fixed-wing aircraft یا هواپیماهای بال ثابت می باشد.

شکل زیر هم دو ساختار کلی که برای ساخت کوادروتور استفاده می شود را نشان می دهد:
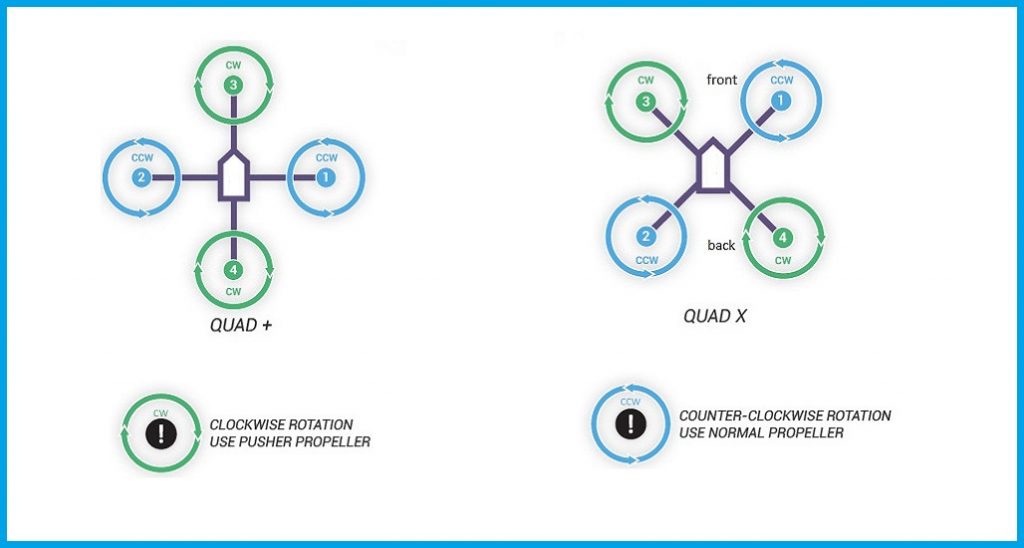 بطور کلی در کوادروتور ها ساختار X به دلیل دید بهتر دوربین جلوی ربات بیشتر کاربرد دارد چون هیچ موتور و ملخی مزاحم تصویربرداری نیست. در مواردی هم به دلیل ساختار + به ساختار یک هواپیما شباهت دارد که جلوی آن با یک مشخص است و موتورهای سمت چپ و راست مشابه بال های هواپیما هستند و موتور عقب مشابه دم هواپیماست و باعث هدایت راحتر آن در آسمان است که باعث شده است این نوع کوادروتور طرفداران خاص خودش را داشته باشد.
بطور کلی در کوادروتور ها ساختار X به دلیل دید بهتر دوربین جلوی ربات بیشتر کاربرد دارد چون هیچ موتور و ملخی مزاحم تصویربرداری نیست. در مواردی هم به دلیل ساختار + به ساختار یک هواپیما شباهت دارد که جلوی آن با یک مشخص است و موتورهای سمت چپ و راست مشابه بال های هواپیما هستند و موتور عقب مشابه دم هواپیماست و باعث هدایت راحتر آن در آسمان است که باعث شده است این نوع کوادروتور طرفداران خاص خودش را داشته باشد.
Y4 copter

نوع ديگر كوادكوپتر مدل Y4 مي باشد كه ساختاري مشابه تري كوپتر دارد ولي به جاي سروو دم يك عدد موتور براشلس قرار گرفته است و در انتهاي دم دو عدد موتور براشلس به صورت هم محور قرار دارند.
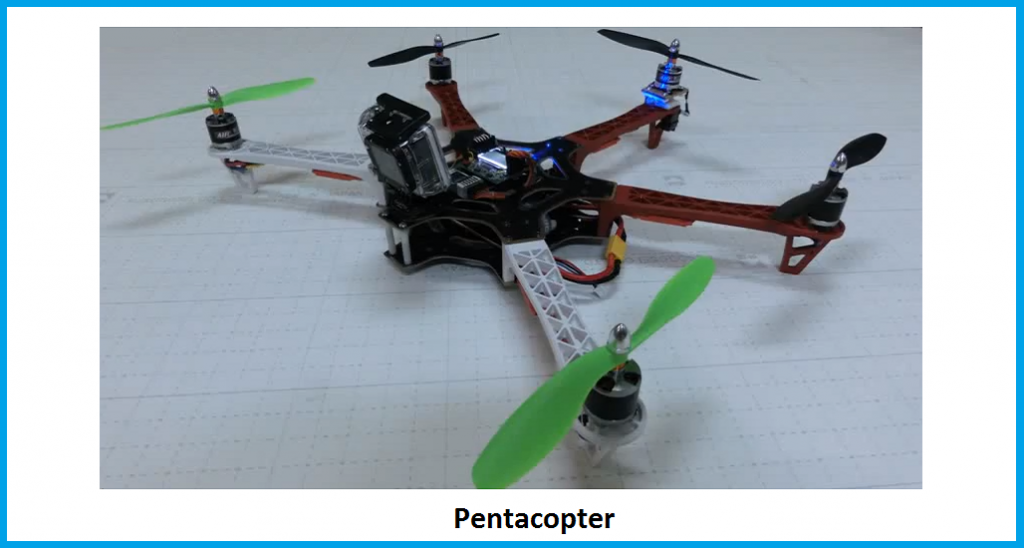
Pentacopter
پرنده ای پنج موتوره که ساختار بسیار جالبی دارد و از قدرت مناسبی جهت پرواز در شرایط بد آب و هوایی برخوردار است.

همچنین پنتاکوپتر به دلیل جاگذاری مناسب موتورها مناسب فیلمبرداری و عکسبرداری می باشد.
Hexacopter
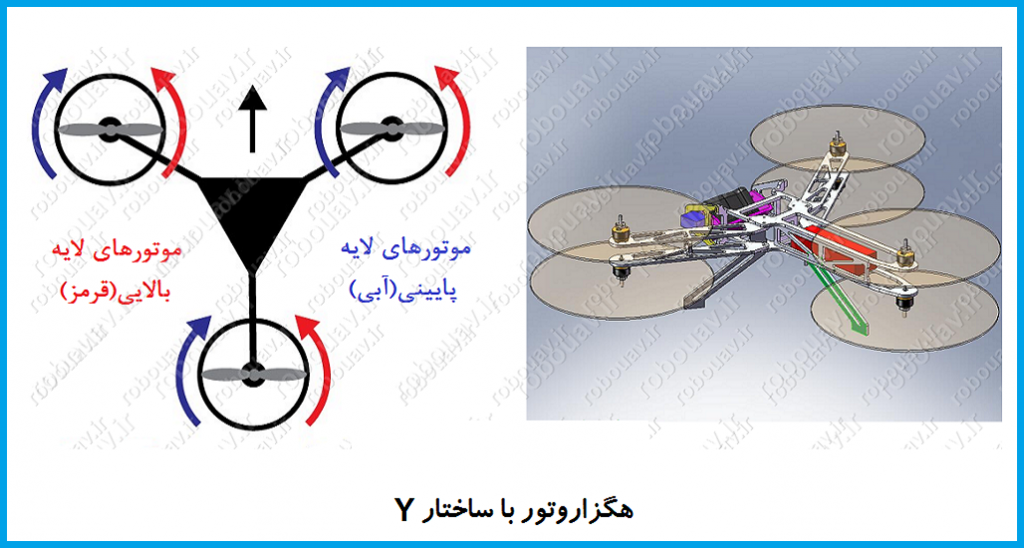
هگزا به معنی شش می باشد. این پرنده شش موتوری به دلیل ساختار متقارن آن ساخت آن آسان است.
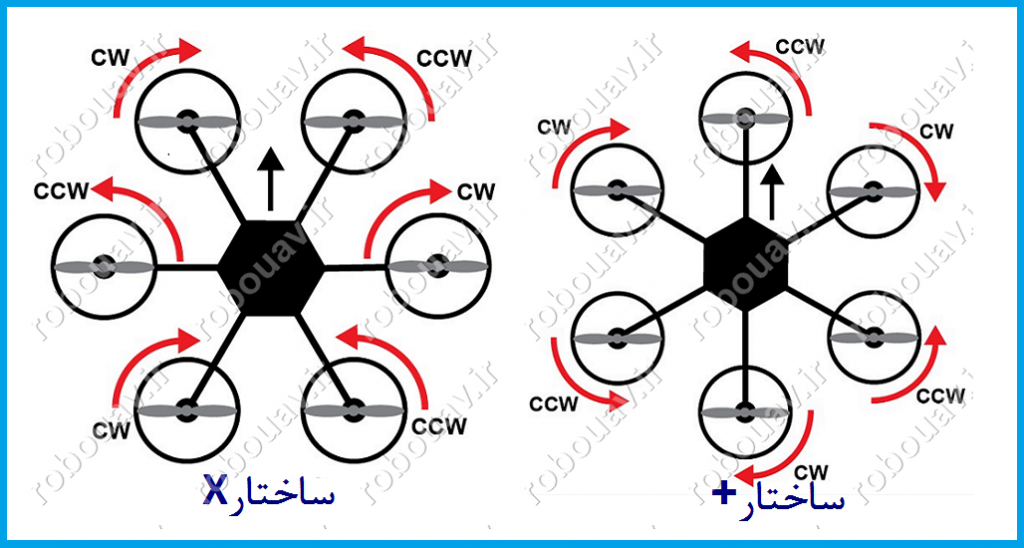 در شکل زیر هم ساختار Y مربوط به هگزاروتور را مشاهده می کنید.
در شکل زیر هم ساختار Y مربوط به هگزاروتور را مشاهده می کنید.
 Octocopter
Octocopter
اوکتا به معنی هشت می باشد. تعداد 8 عدد موتور نصب شده بر روی آن باعث شده است که از قدرت بسیار زیادی برخوردار باشد. و بسیار مناسب جهت فیلم برداری و عکس برداری و پرواز در شرایط سخت می باشد. از مزایای اکتاکوپتر این است که امنیت بالایی را هنگام پرواز برای ما تامین می کند مثلا اگر یکی از موتورها خاموش شود و یا بسوزد موتورهای کناری با افزایش دور می توانند این وضعیت را تا رسیدن به یک نقطه امن برطرف کنند خلبان بتواند یک فرود اضطراری انجام دهد.
در زیر نمایی از یک اُکتاکوپتر را مشاهده می کنید:

در اکتاکوپتر معمولا از چهار نوع طرح برای نصب موتورها استفاده می شود. شکل زیر همه آنها را به صورت یکجا نشان می دهد. دقت کنید که در شرکت های مختلف نامگذاری های متفاوتی صورت می گیرد که ما برای آشنایی شما با این نامگذاری ها آنها را به صورت زیر هم در یک شکل نشان داده ایم. شکل های 3 و 6 یکسانند و شکل های 2 و 5 نیز یکسانند و نمایانگر نوع I8 یا همان + می باشد. شکل شماره 1 هم نوع X یا همان X8 را نشان می دهد. شکل شماره 4 نیز نوع V یا همان V8 را نشان می دهد.
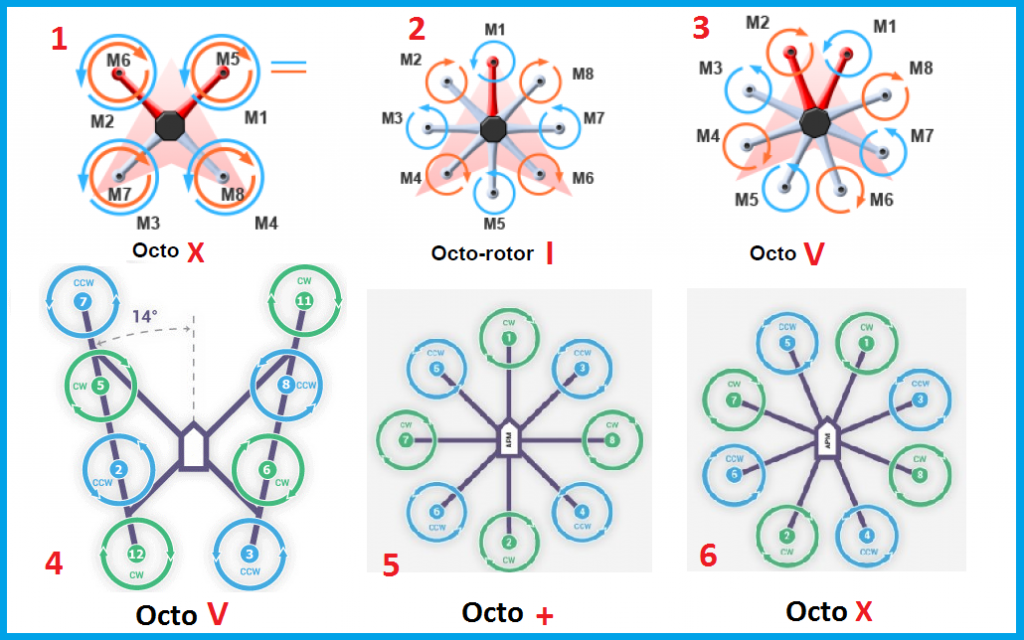
دقت کنید که در شکل شماره 5 از نوع V موتور ها لزوما در یک مسیر مشخص نیستند و می توانند به صورت دو خط موازی نیز نصب شوند که به صورت مستطیل شکل می شود. اگر می خواستیم این نوع آرایش موتورها هم جزو موارد بالا قرار دهیم 5 نوع می شد.

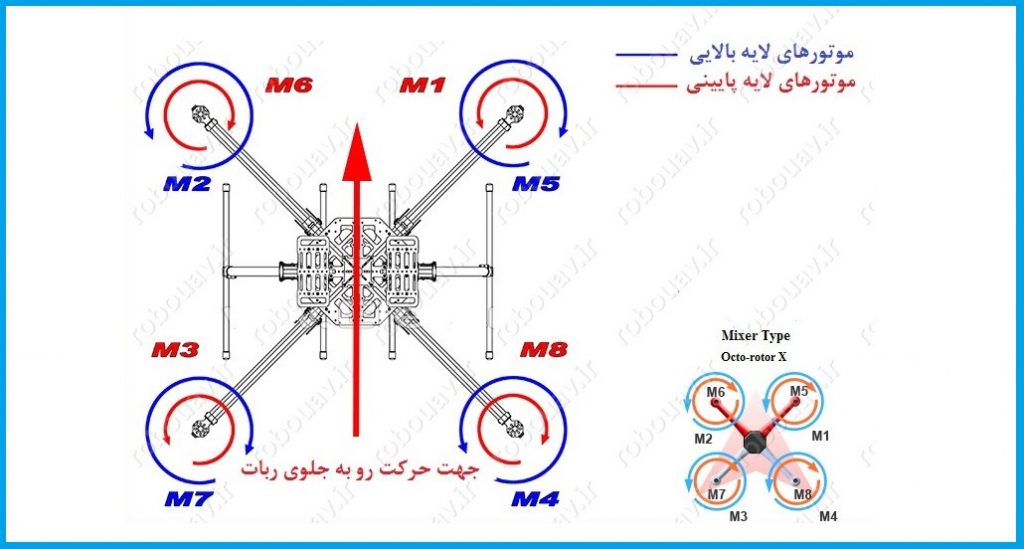
همچنین چینش و چرخش موتورهای نوع X8 به صورت زیر است. یعنی اینکه همانند دو کوادروتور که بر روی هم سوار شده اند می باشد.
براى دسترسى به جلسه بعدى مى توانيد از لينك زير استفاده كنيد: جلسه مولتی روتور هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
206 بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
460 بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
227 بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
212 بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
283 بازدید
43 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
ممنون ازنظرات مفیدتون ،تا بعد خدانگهدار
ممنون جناب مطهری
در پناه ایزد یکتا باشید.
با سلام وعرض خسته نباشید،نمازروزه هاتون قبول انشالله،مهندس جان غرض ازمزاحمت می خواستم پروژه کارشناسی انجام بدم واون اینه که می خواستم کواد کوپتر، رو هوا انرژی خودش رو تامین کنه،به واسطه سل های خورشیدی وتعدادی هم دینام های کوچکی که زیرملخ نصب می شوند که شبیه توربین های بادی سایز کوچک عمل می کنند!!!!!!!
می خواستم نظرتون رو بدونم مهندس این که این پروژه به نظرتون عملی میشه یانه؟؟؟واین که اگرعملی هم بشه به نظرتون بازدهش چند درصد بشه؟؟؟همچنین دعا گویتان خواهم بود اگر در موضوع پروژه ای که گفتم کتابی یا مقاله ای و…..معرفی کنید.با تشکرفراوان مطهری ترم هشت برق الکترونیک.
سلام و وقت بخیر جناب مطهری
قبل از هر چیز باید بگم که پروژه ای که بیان نمودید خیلی بالاتر از زمان یک پروژه و تحقیق کارشناسی می باشد و البته نیازمند کار و تلاش زیاد. علی ایحال من چند نکته خدمتتان عرض می کنم ان شاالله که مفید واقع شود.
1- اینکه قصد دارید از سلولهای فتوولتائیک (photovoltaic cells) برای افزایش زمان پرواز استفاده کنید کار بسیار جالبی است ولی تا آنجایی که من اطلاع دارم در حال حاضر آمپر خروجی از سلولها در ابعادی همچون سطح بالای یک کوادکوپتر نمی تواند به تنهایی به عنوان جریان مصرفی کوادکوپتر استفاده شود و لذا نیازمند این است که شما یک باتری لیتیم پلیمر را با استفاده از یک تاگل سوئیچ به این سلولهای فتوولتائیک متصل کنید تا به باتری شما کمک کند. باز هم تاکید می کنم که این کار نیازمند اطلاعات دقیقی از آخرین وضعیت سلولهای فتوولتائیک و پیشرفت علمی صورت گرفته در این زمینه می باشد با جستجوی لغت photovoltaic cells در گوگل می توانید اطلاعات مناسبی از آنها کسب کنید. در حال حاضر طبق اطلاعات بنده یک شرکت چینی با استفاده از سلولهای خورشیدی توانسته است زمان پرواز را به 48 دقیقه برساند که در جلسه باتری ذکر کردم.
2- اینکه بیان نمودید دینام های کوچکی زیر ملخ نصب شوند نیازمند بررسی بیشتری دارد و البته من از نوع دینام شما و جرم هر دینام اطلاعی ندارم و نیاز به محاسبه دارد. در صورتی که دینام خاصی مد نظر دارید نوع آن را ارسال کنید تا اظهار نظر شود. البته این موضوع برای کوادکوپترهای الکتریکی کمی مشکل به نظر می رسد ولی در مورد کوادکوپترهای سوختی اینکه بتوان چنین طرحی اجرا کرد قوی تر است.
با آرزوی موفقیت برای شما و تمامی هموطنان عزیزمان
مهندس میشه چند تصویر از بیکوپتر بزارید هنراه با یک نقشه از اتصالات مهندس میشه این بی کوپتر را با بک فلایت دست ساز پرواز داد با تشکر
سلام جناب میثمی
کلیه نکاتی که برای کنترل کوادکوپتر استفاده می شود در مورد بی کوپتر هم کاربرد دارد. شکلی از ساختار کلی آن را در زیر آورده ام. در مورد رادیوکنترل هم اینکه هر نوع رادیوکنترلی که تعداد کانال های لازم شما را فراهم کند قابل کاربرد است. یعنی اینکه به دست ساز و شرکتی بودن رادیوکنترل مرتبط نیست و می توانید استفاده کنید.
موفق باشید.
باسلام
ممنون از زحماتی که میکشید و اهمیتی که به مخاطبان میدهید مهندس اون سروو موتور ها و یا موتور ها به کدام پایه های فلایت کنترل متصل می شود یعنی از بین هشت موتوری که میشه به فلایت متصل کرد سروو به کدام و موتور ها به کدام پایه متصل می شوند اگر یکفلایت کنترل داشته باشیم که خودمان طراحی و ساخته ایم کنترل کنیم مهندس در جواب یکی از دوستان گفته بودید یک سروو موتور برای دم که اختیاری هست میشه نصب کرد این دم به چه شکل و نقش او چیست باتشکر
سلام مجدد جناب میثمی
مواردی که مطرح نمودید را در چند بند توضیح می دهم:
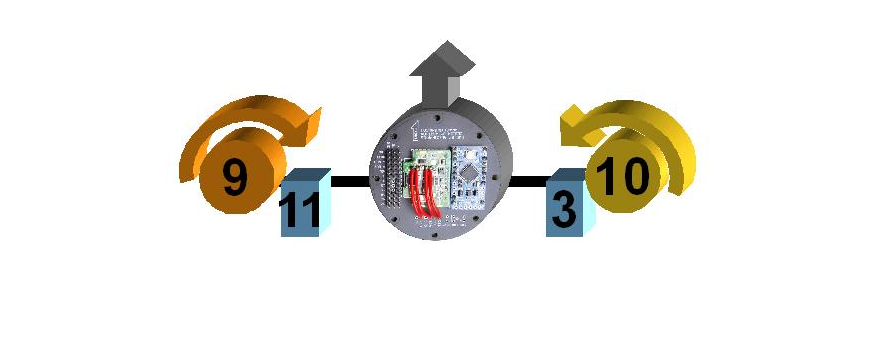
1- در مورد پایه های متصل شونده در صورتی که از فلایت کنترلرهای آماده در بازار استفاده می کنید به صورت دیفالت در درون خودشان مکان اتصال هر موتور براشلس و سروو را نشان می دهد. مثلا اگر به دستورالعمل کار با برد Multiwii مراجعه کنید برای مکان اتصال موتور براشلس و سروو های یک بی کوپتر به خوبی نشان داده شده است و گفته است که سروو ها را به کدام پایه متصل کنید. یک شکل را در متن درس آورده که در قسمت بی کوپتر شکل دوم است. این شکل اعداد مربوط به مکان اتصال موتورها در برد مولتی وی را نشان می دهد. اعداد 9 و 10 یعنی اینکه دو موتور براشلس را به این دو پایه متصل کنید و اعدد 3 و 11 یعنی اینکه اون دو تا سروو را به پایه های شماره 3 و 11 متصل کنید. برای بقیه فلایت کنترلرها هم هر کدام مد نظرتان بود بیان کنید تا راهنمایی شود. یا در مورد بردهای دست ساز محل قرار گیری اتصالات دست خودتان است و می توانید آزادانه اینکار را انجام دهید. مثلا موتور براشلس 1 به پین M1 و موتور براشلس 2 به پین M2 و سروو موتور شماره 1 به پین M3 و سروو موتور شماره 4 به پین M4.
2- بی کوپترها به دلیل اینکه از دو موتور براشلس استفاده می کنند درجات آزادی کمتری نسبت به کوادکوپتر و بقیه مولتی روتورها دارند. مثلا اینکه با دو موتور براشلس شما فقط چرخش حول محور Z و افزایش و کاهش ارتفاع در جهت محور Z را دارید. هر چند با کم کردن دور موتورها می توانید چرخش های دیگری انجام دهید ولی کنترلی روی آن ندارید. در صورتی که درجه آزادی کوادکوپتر 6 است و اینجاست که نیاز به سروو موتورها بوجود می آید تا بتوانیم چرخش و حرکت در بقیه جهات نیز انجام دهیم. حالا این سروو موتورها این آزادی را به ما می دهند که بقیه درجات آزادی را بوجود آوریم و کنترل بی کوپتر آسانتر شود. حالا شما می توانید تعداد سروو موتورها را تا جایی که این 6 درجه آزادی بدست آورید اضافه کنید و کنترل بی کوپتر را آسانتر کنید. اولین کار این است که ما می توانیم 2 تا سروو موتور را برای عقب و جلو رفتن بی کوپتر اضافه کنیم. همچنین می توانیم یک دم برای بی کوپتر قرار دهیم و این دم را با استفاده از سروو موتورهای دیگر کنترل کنیم تا کنترل بی کوپتر باز هم آسانتر شود. در حقیقت با اضافه کردن دم به انتهای بی کوپتر ما قسمت های رادر و الویتر را به بی کوپتر اضافه کرده ایم که یک چیز اختیاری است و بدون آنها هم می توان پرواز را انجام داد. یک شکل برایتان ضمیمه کرده ام که این مطلب واضح تر شود. در صورتی که متوجه نشدید بیان کنید تا شکل های بیشتری را ضمیمه کنم.
مطالب و بحث های مربوط به بی کوپتر مفصل است و برای اینکه ساده تر شود از بیان مطالب اضافی خودداری شده است.
موفق باشید.
سلام
اگرموتور های کوادکوپتر را گوشه های یک چهار ضلعی در نظر بگیریم. این چهار ضلعی مربع خواهد بود یا مستطیل؟
واینکه بین طول و عرض فرضی چه رابطه ای وجود دارد؟
با سلام
در مورد کوادکوپتر موتورها بر روی گوشه های یک مربع نصب می شوند تا بتوانند به صورت یکسان عمل کنند. در حقیقت در یک کوادکوپتر دو موتور بر روی یک قطر مربع نصب می شوند و جهت چرخش یکسان دارند و دو موتور دیگر بر روی قطر دیگر نضب می شوند و جهت چرخش یکسان دارند.
موفق باشید.