مولتی روتور و انواع آن{جلسه اول}
مقدمه اى بر مولتی روتور
مولتی روتور به ربات هاى پرنده اى گفته مى شود كه با استفاده از چند موتور مى تواند يك پرواز پايدارى را براى شما فراهم سازد. در ادامه با تك تك مولتى روتورهاى ساخته شده آشنا مى شويم.
کاربران محترم، خواندن جلسه مولتی روتور بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
Singlecopter OR Coaxcopter
سینگل به معنای یک می باشد. این پرنده فقط دارای یک موتور است. البته سينگل كوپتر را قاعدتا نبايد جزو مولتي روتورها حساب كنيم چون لفظ مولتي روتور به معناي تعداد دو يا بيشتر از دو موتور است ولي براي كامل شدن مجموعه در بعضي موارد آن را جزو اين گروه حساب مي كنند.كنترل سينگل كوپتر هم با استفاده از تيغه هاي انتهایی آن است که به وسیله سروو موتورها کنترل می شود. تعداد سروو موتورها به نوع طراحی تیغه هایی که در انتهایی آن قرار داده می شود بستگی دارد. اين پرنده به دلیل اینکه ناپایداری زیادی دارد کمتر مورد توجه است ولی به دلیل اینکه دارای یک موتور براشلس است زمان استفاده از باتری افزایش می یابد و زمان بسیار زیادی را می توان در هوا پرواز نمود به همین دلیل برای مقاصد خاص می توان از این نوع پرنده بهره گرفت. ویدیوی طراحی سینگل کوپتر را می توانید از اینستاگرام ما دنبال کنید.

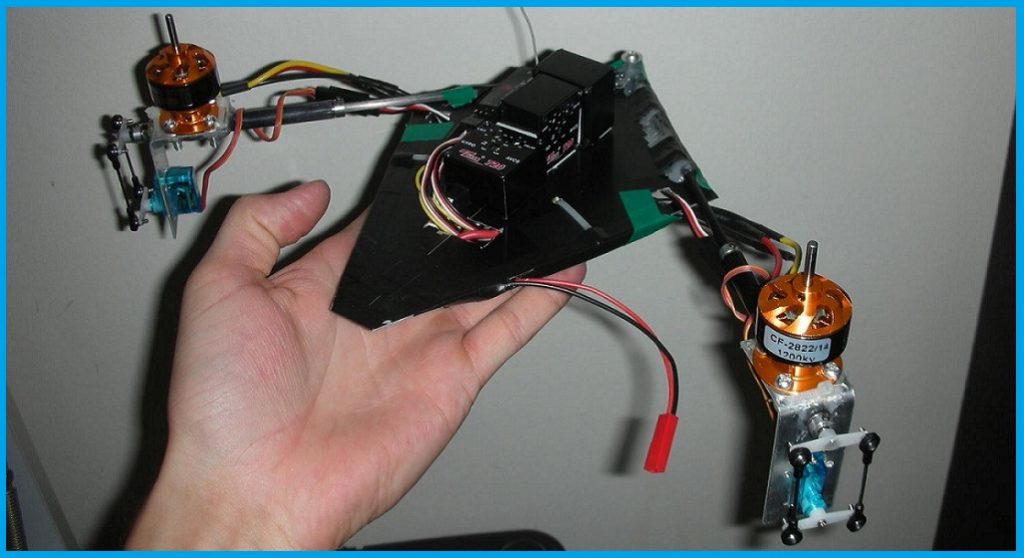
Twincopter OR Bicopter OR Dualcopter
دوال به معنای دو می باشد. همچنين اين پرنده را باي كوپتر نيز مي نامند. این پرنده دارای دو موتور می باشد که به شکل های مختلف و با استفاده از سرووها حرکات مختلف آنها به اجرا در می آید. به طور کلی دو سروو موتور در قسمت انتهایی هر بازو استفاده می شود که در قسمت زیرین موتورهای براشلس قرار می گیرد.در زیر نمونه ای از این پرنده را مشاهده می کنید. اجزای تشکیل دهنده دوال روتور عبارتند از:
- دو عدد موتور براشلس
- دو عدد سروو موتور
- بدنه
- فلایت کنترلر
- دو عدد اسپید کنترل
- باتری
- دو عدد ملخ
- دو عدد سروو موتور
دوال کوپتر نیز به دلیل اینکه از دو موتور براشلس بهره می گیرد از زمان پرواز مناسبی برخوردار است و به دلیل پایداری بیشتر نسبت به سینگل کوپتر و عمر بیشتر باتری نسبت به کوادکوپتر و بقیه مولتی روتورها استفاده می شود.
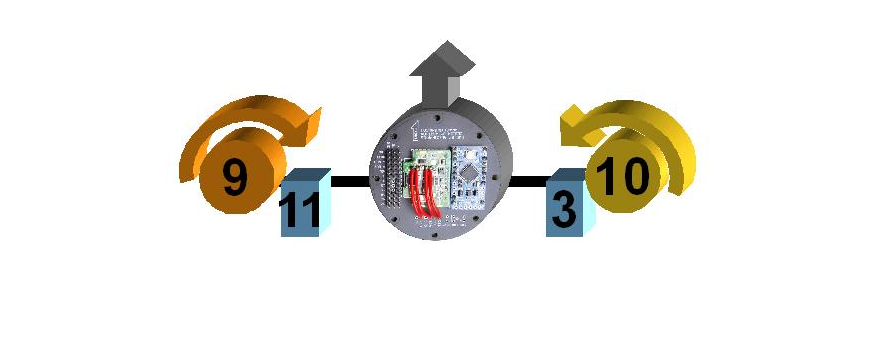
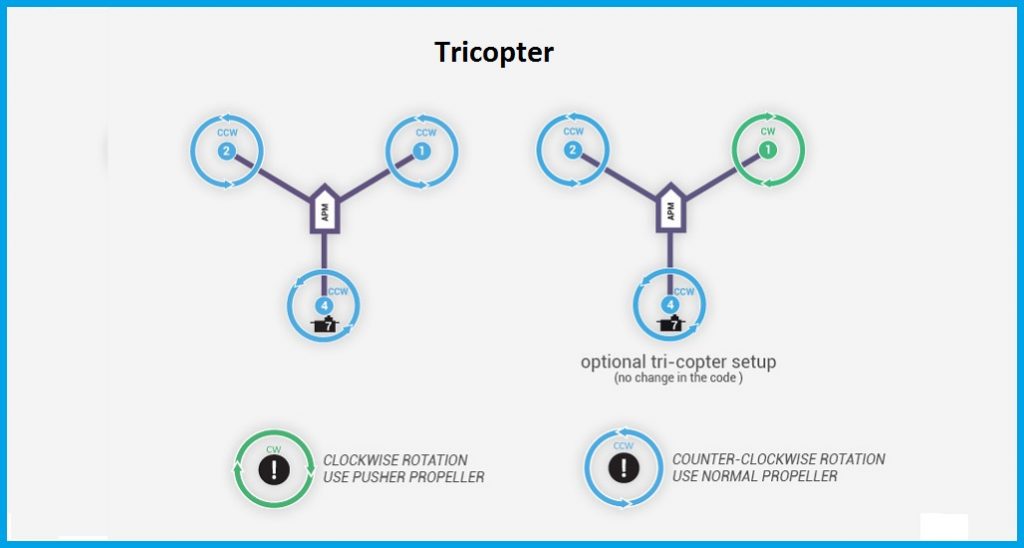
Tricopter

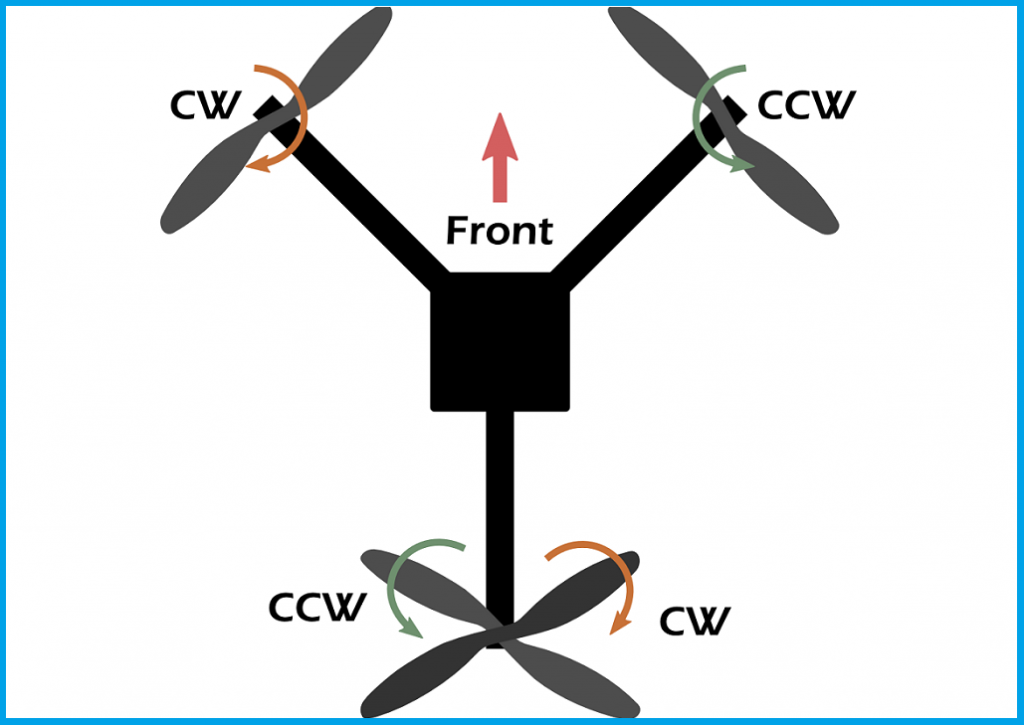
تری به معنای سه می باشد. سه عدد موتور بر روی این مولتی روتور نصب می شود.
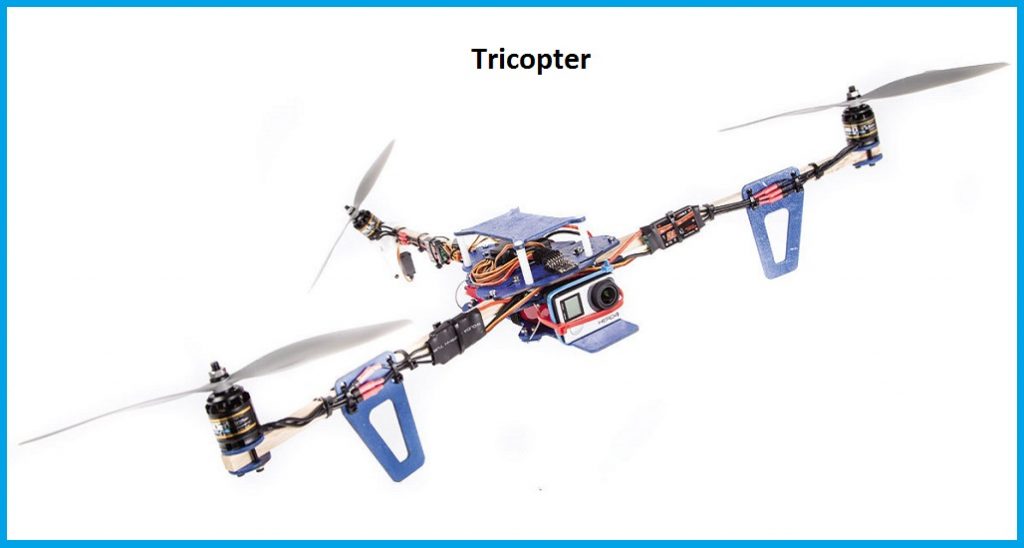
یک سروو موتور در انتهای آن وجود دارد که جهت چرخش ربات استفاده می شود. در شکل فوق مشاهده می کنید که یکی از موتورها به سروو متصل است.
Quadcopter OR Quadrotor
به معنی پرنده ایه که چهار تا موتور داره. کواد به معنی چهار می باشد . ساخت کوادکوپتر بسیار آسان تر از بقیه موارد است و از محبوبیت خاصی برخوردار است.به این پرنده کوادروتور هم میگویند. کوادروتور در دسته روتورکرافت ها(rotorcraft) می باشد که نقطه مقابل fixed-wing aircraft یا هواپیماهای بال ثابت می باشد.

شکل زیر هم دو ساختار کلی که برای ساخت کوادروتور استفاده می شود را نشان می دهد:
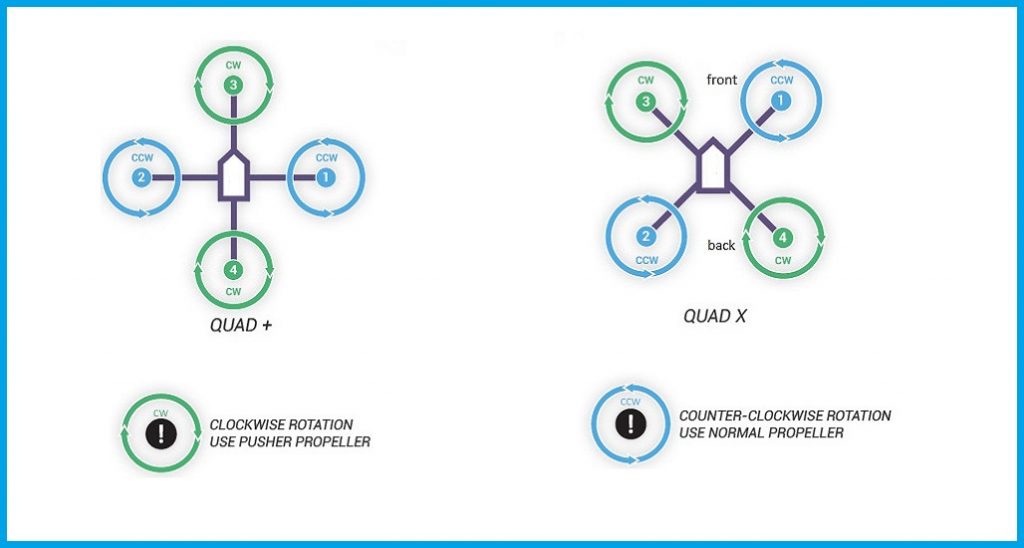 بطور کلی در کوادروتور ها ساختار X به دلیل دید بهتر دوربین جلوی ربات بیشتر کاربرد دارد چون هیچ موتور و ملخی مزاحم تصویربرداری نیست. در مواردی هم به دلیل ساختار + به ساختار یک هواپیما شباهت دارد که جلوی آن با یک مشخص است و موتورهای سمت چپ و راست مشابه بال های هواپیما هستند و موتور عقب مشابه دم هواپیماست و باعث هدایت راحتر آن در آسمان است که باعث شده است این نوع کوادروتور طرفداران خاص خودش را داشته باشد.
بطور کلی در کوادروتور ها ساختار X به دلیل دید بهتر دوربین جلوی ربات بیشتر کاربرد دارد چون هیچ موتور و ملخی مزاحم تصویربرداری نیست. در مواردی هم به دلیل ساختار + به ساختار یک هواپیما شباهت دارد که جلوی آن با یک مشخص است و موتورهای سمت چپ و راست مشابه بال های هواپیما هستند و موتور عقب مشابه دم هواپیماست و باعث هدایت راحتر آن در آسمان است که باعث شده است این نوع کوادروتور طرفداران خاص خودش را داشته باشد.
Y4 copter

نوع ديگر كوادكوپتر مدل Y4 مي باشد كه ساختاري مشابه تري كوپتر دارد ولي به جاي سروو دم يك عدد موتور براشلس قرار گرفته است و در انتهاي دم دو عدد موتور براشلس به صورت هم محور قرار دارند.
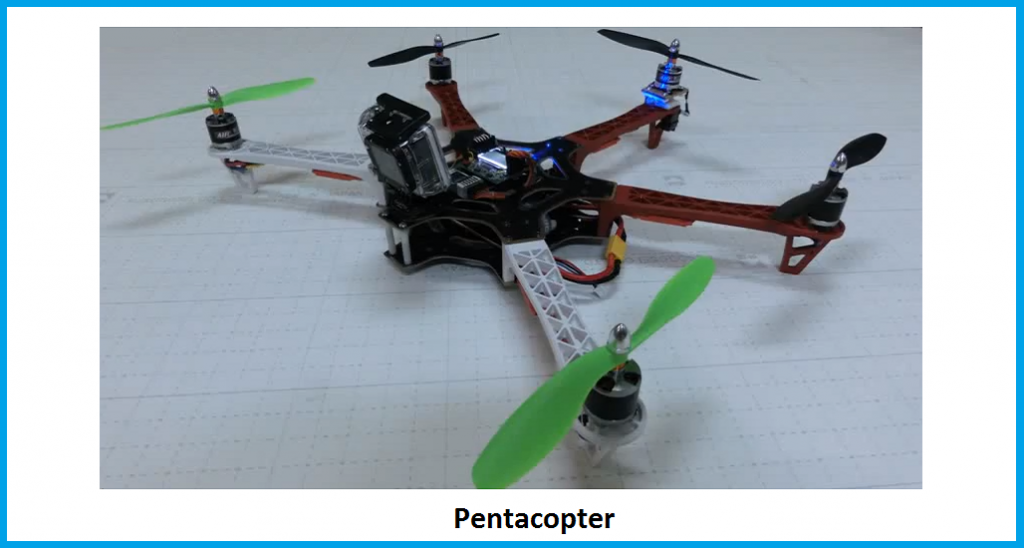
Pentacopter
پرنده ای پنج موتوره که ساختار بسیار جالبی دارد و از قدرت مناسبی جهت پرواز در شرایط بد آب و هوایی برخوردار است.

همچنین پنتاکوپتر به دلیل جاگذاری مناسب موتورها مناسب فیلمبرداری و عکسبرداری می باشد.
Hexacopter
هگزا به معنی شش می باشد. این پرنده شش موتوری به دلیل ساختار متقارن آن ساخت آن آسان است.
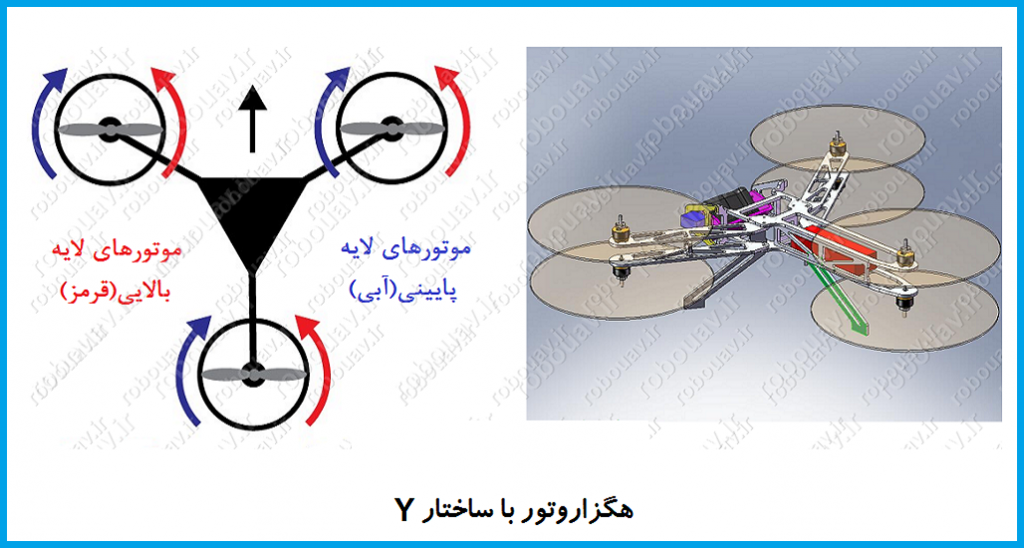
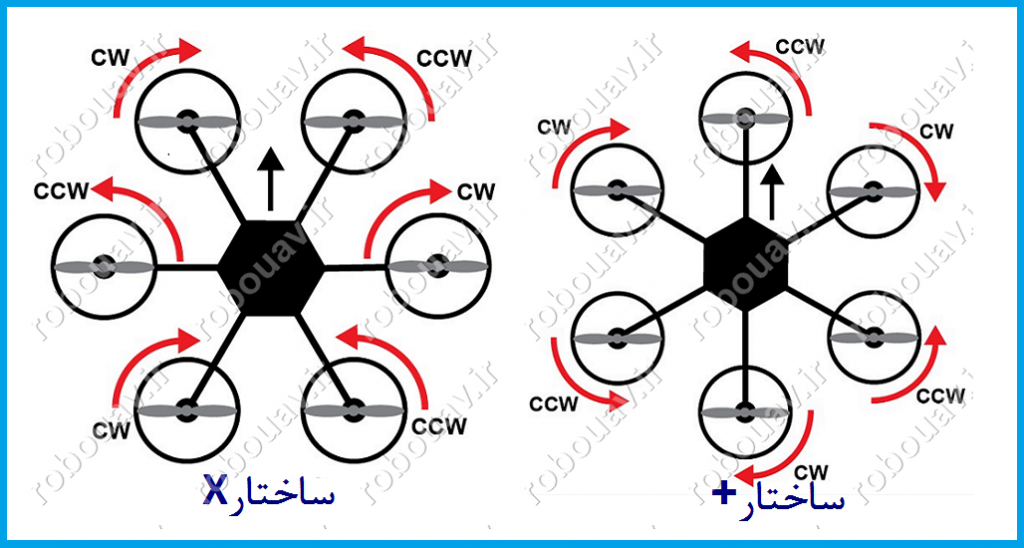 در شکل زیر هم ساختار Y مربوط به هگزاروتور را مشاهده می کنید.
در شکل زیر هم ساختار Y مربوط به هگزاروتور را مشاهده می کنید.
 Octocopter
Octocopter
اوکتا به معنی هشت می باشد. تعداد 8 عدد موتور نصب شده بر روی آن باعث شده است که از قدرت بسیار زیادی برخوردار باشد. و بسیار مناسب جهت فیلم برداری و عکس برداری و پرواز در شرایط سخت می باشد. از مزایای اکتاکوپتر این است که امنیت بالایی را هنگام پرواز برای ما تامین می کند مثلا اگر یکی از موتورها خاموش شود و یا بسوزد موتورهای کناری با افزایش دور می توانند این وضعیت را تا رسیدن به یک نقطه امن برطرف کنند خلبان بتواند یک فرود اضطراری انجام دهد.
در زیر نمایی از یک اُکتاکوپتر را مشاهده می کنید:

در اکتاکوپتر معمولا از چهار نوع طرح برای نصب موتورها استفاده می شود. شکل زیر همه آنها را به صورت یکجا نشان می دهد. دقت کنید که در شرکت های مختلف نامگذاری های متفاوتی صورت می گیرد که ما برای آشنایی شما با این نامگذاری ها آنها را به صورت زیر هم در یک شکل نشان داده ایم. شکل های 3 و 6 یکسانند و شکل های 2 و 5 نیز یکسانند و نمایانگر نوع I8 یا همان + می باشد. شکل شماره 1 هم نوع X یا همان X8 را نشان می دهد. شکل شماره 4 نیز نوع V یا همان V8 را نشان می دهد.
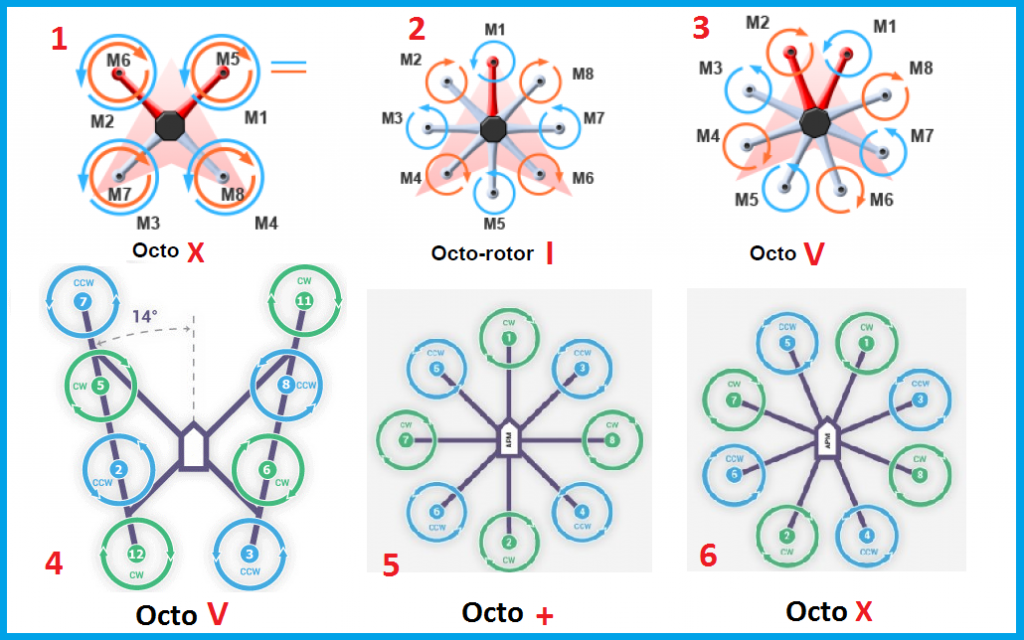
دقت کنید که در شکل شماره 5 از نوع V موتور ها لزوما در یک مسیر مشخص نیستند و می توانند به صورت دو خط موازی نیز نصب شوند که به صورت مستطیل شکل می شود. اگر می خواستیم این نوع آرایش موتورها هم جزو موارد بالا قرار دهیم 5 نوع می شد.

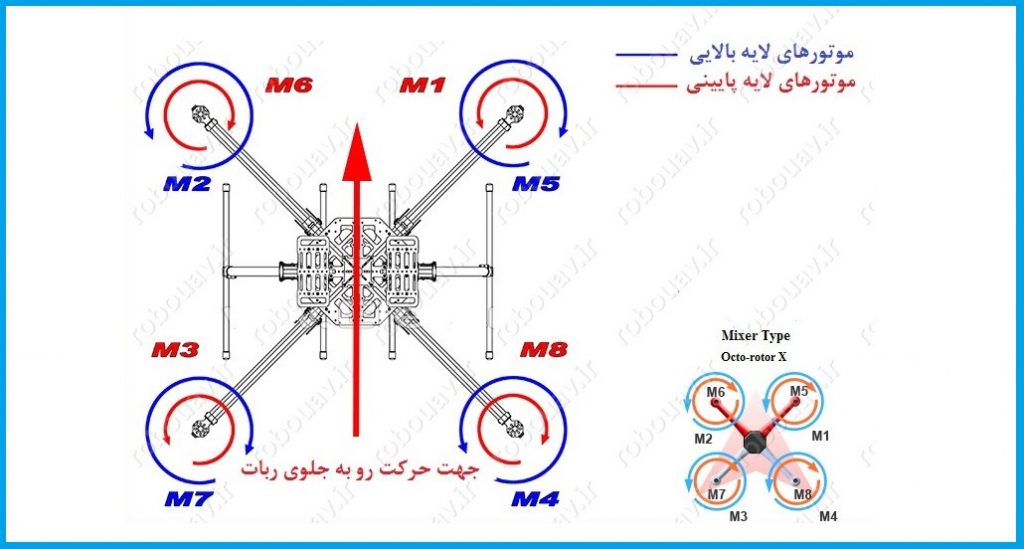
همچنین چینش و چرخش موتورهای نوع X8 به صورت زیر است. یعنی اینکه همانند دو کوادروتور که بر روی هم سوار شده اند می باشد.
براى دسترسى به جلسه بعدى مى توانيد از لينك زير استفاده كنيد: جلسه مولتی روتور هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.63k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
30.98k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.86k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.42k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2.07k بازدید
43 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
سلام
کوادکوپتر تا چه ارتفاعی بالا میرود؟واین ارتفاع به چه عواملی بستگی دارد؟
با سلام و عرض تبريك به مناسبت سال نو
در مورد ارتفاع كوادكوپتر اينكه اين ارتفاع به برد راديوكنترل شما بستگي دارد و تا هر محدوده اي كه هوا وجود داشته باشد و راديوكنترل شما برد داشته باشد مي توانيد كوادكوپتر خود را پرواز دهيد زيرا كار كوادكوپتر اين است كه هوا را به عقب براند و خودش به جلو برود. پس تا زماني كه هوا موجود باشد مشكلي پيش نمي آيد ولي به محض اينكه شرايط خلا ايجاد شود كوادكوپتر متوقف مي شود و نمي تواند پرواز كند. براي اينكار خودتان نيز مي توانيد اين آزمايش را انجام دهيد. يك محفظه شيشه اي آماده كنيد و يك روزنه كوچك روي بدنه آن قرار دهيد و اين روزنه را به يك پمپ خلا متصل كنيد و در درون اين محفظه شيشه اي يك ميني كوادكوپتر قرار دهيد. در حالت عادي كوادكوپتر به راحتي پرواز مي كند ولي با مكش هواي درون محفظه به وسيله پمپ خلا به مرور زمان كوادكوپتر در اثر كمبود هوا دچار لرزش مي شود و به ديواره برخورد مي كند.
موفق باشيد
سلام
بی کوپتر ها چجورند اونها هم تمامی این قطعات را دارند البته این مدل اگه موتور ها قوی باشه بار حمل کنه شاید 300 گرم
با سلام خدمت شما
Bicopter ها با داشتن دو موتور براشلس و دو عدد سروو کار هدایت مولتی روتور را انجام میدهند. نحوه کارش هم بدین گونه است که برای پرواز عمودی که شرایط نرمال است و با افزایش تراتل پرواز نرمی صورت میگیرد ولی برای حرکت رو به جلو و دیگر چرخش ها از دو سرووی قرار گرفته روی بازوها استفاده می شود تا زاویه چرخش ملخ ها تغییر پیدا کند. در مورد قدرتشان هم بستگی به نوع موتور مورد استفادتان دارد و قطعا هر چه موتورتان قوی تر باشد وزن بیشتری هم بلند می کند در جلسه مربوط به محاسبات کوادکوپتر نحوه انتخاب موتور را ذکر کرده ایم.
اجزای یک Bicopter:
1- 2عدد موتور براشلس
2- 2 عدد سروو موتور
3- 2عدد اسپیدکنترل
4- 1 عدد سروو موتور دم(اختیاری)
5- 2عدد ملخ
موفق باشید
جناب قاسمی خسته نباشید
آیا کامنتت ها تایید نمیشوند؟
سلام. کامنت ها پس از پاسخ کامل تایید خواهند شد. موفق باشید.
سلام جناب اردستانی بزرگوار
بله پاسخ داده می شوند. هیچ کامنتی بدون پاسخ رها نمی شود. ولی متاسفانه بعضی تایم ها به دلیل مشغله و کار زیاد وقت کم می آوزیم. ان شاالله بتوانیم زودتر پاسخگو باشیم. از همه دوستان بابت تاخیر پوزش می طلبیم.
موفق باشید.
با سلام و عرض خسته نباشید بابت زحمات بی وقفه شما
با تشکر از پاسخ های بسیار مفیدی که ارائه میفرمائید
سوال اصلی این هست که تفاوت ها در چینش موتور در شکل های ۱-۶ که در عکسی که گذاشتید مشهود است در چیست؟ هر کدام چه کاربردی دارند؟
و اما سوال فرعی اینجاست چه تفاوتی از لحاظ کارایی بین شکل ۱ و ۶ هست؟
با سلام و احترام
در مورد نوع های مختلف اکتاکوپتر بدین گونه است که بعضی از آنها فقط به دلیل نامگذاری متفاوت شرکت های سازنده اینگونه متفاوت شده اند وگرنه در اصل قضیه تفاوتی ایجاد نشده است و یکسان هستند. مثلا نوع 2 و 5 کاملا یکسان هستند و یا اینکه نوع 3 و 6 کاملا یکسان هستند و فقط نامگذاری های متفاوت انجام شده است. در مورد مقایسه نوع های 5 و 6 باز هم همان تفاوت های مربوط به کوادکوپتر از نظر نحوه دید دوربین و مشخص بودن جلوی ربات در آسمان و… وجود دارد. البته در مورد بازده نوع های X و + تحقیق جامعی صورت نگرفته است. در مورد کوادکوپترها، در صورتی که نصف یک ملخ شکسته شود نوع X پایدارتر عمل می کند. در مورد مدل OCTO V هم که کلا محدوده دید وسیعی دارد و بسیار مناسب فیلمبرداری و عکس برداری می باشد.
برای نوع های 1 و 6 تفاوت هایی که بارزتر است را در زیر می آوریم.
مزایای نوع 1 نسبت به نوع 6:
1- در صورتی که یکی از موتورها از کار بیفتد موتور دیگر در حال حرکت است و می توان پرنده را تا محلی امن هدایت کرد و فرود آورد.
2- به دلیل اینکه از 4 بازو کمتر استفاده می کنید پرنده دارای وزن کمتری می شود.
3- به دلیل اینکه موتورها در یک محور نصب می شوند به فضای کمتری جهت نصب نیاز دارید و از لحاظ ابعادی و قابل حمل بودن مناسب تر می باشد.
4- قابلیت مانور پرنده در باد مناسب تر است زیر مساحتی که باد به آن برخورد می کند کمتر است و موتورها به دلیل هم پوشانی مساحت کمتری دارند و اینکه با تقویت جریان هوای هم پیشرانش بهتری صورت می گیرد.
معایب نوع 1 نسبت به نوع 6:
1- بازده پرنده در حالت کلی از 5 تا 20 درصد کاهش می یابد که این بسته به نوع ملخ و ابعاد و گام آن و همچنین فاصله بین دو موتور دارد. موتور پایینی فقط باعث افزایش سرعت جریان هوای موتور بالایی می شود.
2- از لحاظ موقعیت دید دوربین به دلیل اینکه ملخ ها هم در پایین هستند و هم در بالا هستند در زاویه دید دوربین قرار میگیرند و در صورتی که نیاز دارید دوربینتان با زوایای متفاوتی فیلمبرداری انجام دهد با این مشکل مواجه می شوید.
3- به لحاظ اینکه موتورها در یک محور قرار دارند در صورتی که نیاز باشد تا بازده ربات را تغییر دهید و فاصله بین دو موتور را افزایش دهید باید پایه های پرنده را بلندتر استفاده کنید که بازهم وزن ربات تغییر می کند.
4- نیاز به فریم هایی دارید که قابلیت تحمل تراست دو موتور در یک بازو را داشته باشند و هر فریمی را نمی توانید استفاده کنید.
5- تعدادی از فلایت کنترلر های تجاری از نوع 1حمایت نمی کنند که این را هم باید قبل از خرید فلایت کنترل در نظر بگیرید.
موفق باشید.