جایروکوپتر چیست؟
مقدمه
انسان همواره در تلاش برای پرواز بر فراز آسمان بوده است که اینکار را به وسیله هواپیما و هلی کوپتر و غیره انجام داده است. یکی دیگر از وسایل پرنده که این روزها بسیار مورد توجه قرار گرفته است جایروکوپتر (Gyrocopter)است. برای انجام کارهای آکروباتیک و تفریحی با این وسیله پرنده می توانید به جزیره کیش سفر کنید و از پرواز با آن لذت ببرید. همانگونه که در شکل زیر مشاهده می کنید این وسیله در حقیقت ترکیبی از هواپیما و هلی کوپتر می باشد. این وسیله ابتدا توسط مهندس اسپانیایی(Juan de la cierva) در سال 1923 اختراع شد که در جنگ جهانی دوم نیز از آن استفاده می شد.

اسامی دیگر جایروکوپتر که شاید شنیده باشید:
- اتوجایرو(autogyro)
- جایروپلن(gyroplane)
- روتاپلن(rota plane)
نام های هواچرخ یا هواگرد نیز از دیگر اسامی است که بعضا به آن اطلاق می شود. در سال 1923 آقای داسیروا نام اتوجایرو را برای وسیله پرنده خود برگزید و در سال 1953 دکتر ایگور بنسن با خلاقیت های بیشتر نام جایروکوپتر را برای آن برگزید.

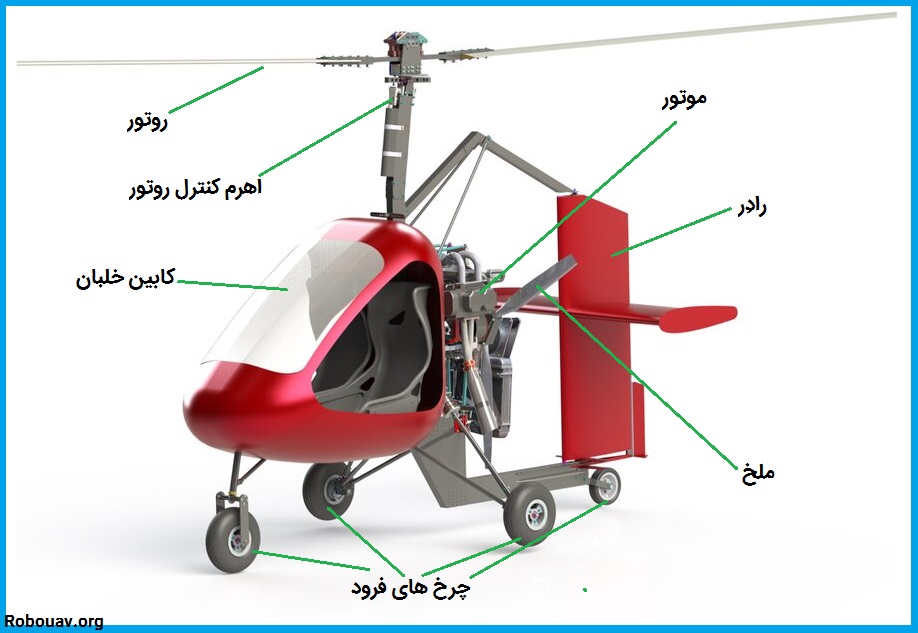
اجزای جایروکوپتر
جایروکوپتر از قطعات زیر تشکیل می شود:
- موتور
- ملخ
- روتور
- اهرم کنترل روتور
- کابین خلبان
- چرخ های فرود
- رادِر
ساختار جایروکوپتر
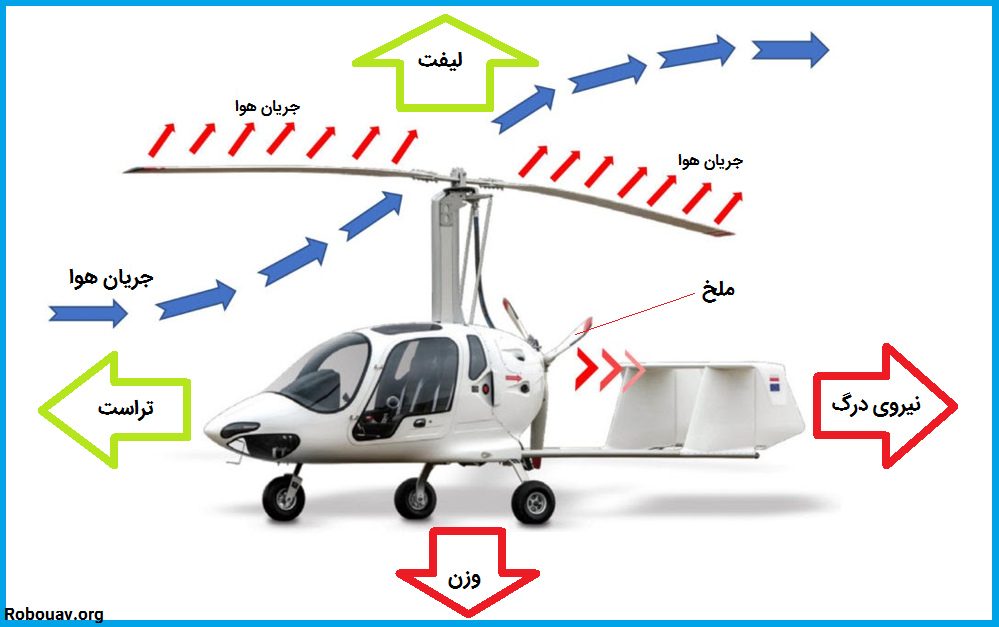
نحوه حرکت جایروکوپتر بدین صورت است که با استفاده از یک ملخ در قسمت انتهایی حرکت افقی شروع می شود و در یک مسافت کوتاه با استفاده از نیروی طبیعی هوا که به روتور وارد می شود از زمین بلند می شود. بر خلاف هلی کوپتر نیروی موتور فقط در اختیار ملخ است و صرف جلو رفتن می شود و روتور کاملا آزاد است و حتی اگر موتور خاموش شود باز هم دچار واماندگی نمی شود زیرا روتور اصلا به موتور متصل نیست و به آرامی سرعت آن کم می شود و می تواند بدون حادثه فرود بیاید. روتور به وسیله اهرم هایی که به آن متصل است تغییر زاویه می دهد و به عنوان یک کنترل کننده دیگر در اختیار خلبان است.
در قسمت انتهایی آن نیز یک بالچه قرار داده شده است که به عنوان رادر در هواپیما عمل می کند و برای چرخش جایروکوپتر حول محور Z یا همان حرکت به دور خودش استفاده می شود.
در شکل زیر نیروهایی که به جایروکوپتر وارد می شود را مشاهده می کنید:
در شکل زیر یک جایروپلن Cierva C30 مربوط به انگلستان را مشاهده می کنید که در زمان جنگ جهانی دوم استفاده می شده است. همانطور که می بینید ملخ های این جایروکوپتر در قسمت نوک قرار دارد و به روتور آن نیز به جای آنکه دو پره داشته باشد سه پره دارد. اگر دقت کنید می بینید که ملخ آن بر خلاف روتور دارای دو پره است که به ویژگی های موتور متصل به آن بر می گردد. برای تاثیر افزایش تعداد پره و اثرات آن می توانید از لینک زیر استفاده کنید:

در شکل بالا روتور سه پره داشت و ملخ دو پره داشت ولی در طراحی های حال حاضر ملخ را سه پره ای و روتور را دو پره ای می سازند. هدف از بیان تعداد پره های ملخ و روتور این است که شما می توانید حالت های مختلفی را برای طراحی جایروکوپتر خود در نظر بگیرید و این بستگی به توقعاتی دارد که شما از وسیله پرنده خود دارید. قطعا هر چه تعداد پره های ملخ را افزایش دهید تراست افزایش می یابد و بازده کاهش می یابد.

داده های فنی زیر مربوط به جایروکوپتر با ملخ سه پره و روتور دو پره MTOsport2017 می باشد:
| L x W x H: | 5,1 m x 1,9 m x 2,7 m |
| Empty weight: | 245-295 kg |
| MTOW: | 450-560 kg |
| Engine: | Rotax 912 ULS / 914 UL / 915 IS |
| Cruise speed: | 145 km/h |
| Max speed: | 185 km/h |
| Fuel Capacity: | 94 L |
| Range: | 6,7 flight hours / 740 km |
| Rotor diameter: | 8,4 m |
| Compliant with: | BUT, Section T, ASRA |
قطعا هر چه تعداد پره های ملخ را افزایش دهید نیازمند یک موتور قوی تر هستید. این موتور قوی تر با توجه به اینکه مصرف سوخت بیشتری دارد مسافت کمتری را نیز طی می کند ولی قدرت مانور و سرعت آن بیشتر است.

این جلسه هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید





2 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
سلام وقت بخیر، من دوره کوادکوپتر رو خریداری کردم ولی هنوز موفق به دریافت آن نشده ام.
سلام و احترام
در صورتی که هنوز اکانت شما فعال نشده است به اکانت تلگرام پشتیبانی سایت پیام دهید.
robotech_academy@
موفق باشید