موتور DC ، مزايا و معايب آن{جلسه چهارم}
مقدمه بر موتور DC
در جلسه چهارم از سرى جلسات آموزشى دوره جامع كوادروتور قصد داريم در موتور DC و البته نوع خاص موتور DC كه در ربات هاى پرنده استفاده مى شود بحث كنيم. براى دسترسى به جلسه قبل مى توانيد از لينك زير استفاده كنيد:
علت اینکه این جلسه را به موتور دی سی اختصاص داده ايم به دلايل زير است:
1- شناخت تفاوت های اساسی موتور DC و BLDC (براشلس)
2- آشنايى با موتورهاى كورلس مورد استفاده در كوادروتور
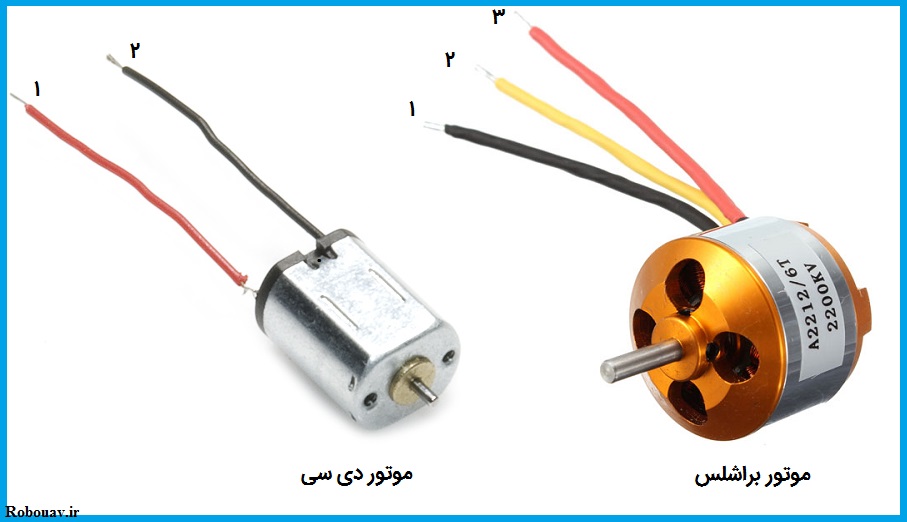
عبارت DC مخفف Direct Current مى باشد كه به معناى جريان مستقيم است و عبارت BLDC به معناى Brushless Direct Current مى باشد كه به معناى جريان مستقيم بدون جاروبك مى باشد. در زير نمونه هايى از اين دو موتور نشان داده شده است. در جلسات آينده به طور كامل موتورهاى براشلس نيز شرح داده مى شود.
ساختمان يك موتور دى سى
نحوه کار موتورهای دی سی به صورت زیر است:
همانگونه كه در انيميشن بالا مشاهده مى كنيد موتور DC فقط داراى دو عدد سيم است و اين آشكارترين تفاوت موتور DC با موتور BLDC است كه داراى سه سيم است(البته فقط موتور براشلس بدون سنسور). شكل زير نمونه اى ديگر از يك موتور DC را نشان مى دهد:

اجزاى داخلى يك موتور DC به صورت زير است:
- آهنربای دائمی(استاتور)
- روتور(آرميچر)
- کموتاتور
- جاروبک ها
- سيم پيچ
- شافت
شکل زير ساختار داخلی یه موتور دی سیمعمولی که جزء اصلى همه اسباب بازی هاست را نشان مى دهد. همانطور که ملاحظه می کنید اين موتور داراى شش بخش اصلى است كه در بالا نام برده شد.
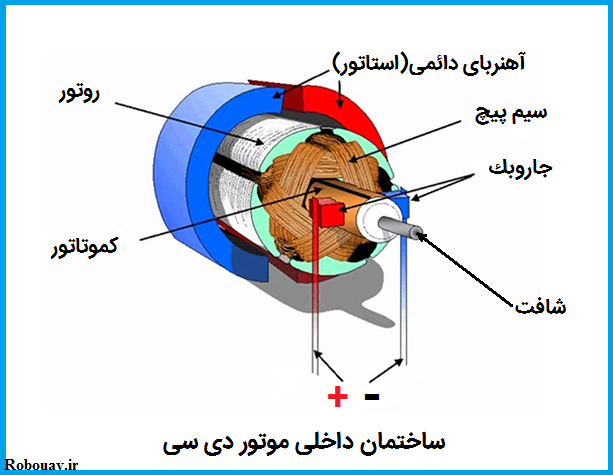
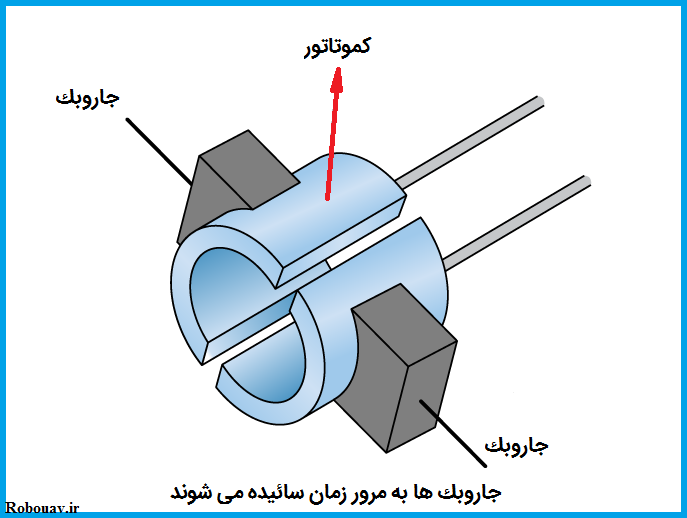
در يك موتور دى سى آهنرباهای دائمی هميشه ثابت هستند و سیم پیچ ها كه بر روى روتور قرار گرفته اند در حال حرکتند بنابراين براى انتقال جريان به سيم پيچ هاى در حال حركت نياز به ابزارى است كه اين جريان را منتقل كند كه اصطلاحا به آنها جاروبك يا Brush مى گويند.
روند کار بدین صورت است که ابتدا جریان برق باتری از طریق قطب – و قطب + وارد جاروبک ها میشود و از آنجا به کموتاتور میرسد که به صورت مداوم در حال چرخش است. کموتاتور هم جریان رسیده را وارد سیم پیچ ها می کند و باعث میشود سیم پیچ ها یک میدان مغناطیسی را دورتا دور خودشان ایجاد کنند. این میدان مغناطیسی به همراه آهنربای دائمی باعث چرخش روتور مى شوند كه خروجى آن به صورت يك شافت در حال چرخش است.
موتورهاى كورلس
در بسيارى از مينى كوادروتورها از نوع خاصى از موتورDC استفاده می شود كه با نام موتورهاى كورلس يا Coreless شناخته مى شوند. اين نوع موتورها بدون هسته آهنى ساخته مى شوند. راه اندازى و كار با اين موتورها بسيار آسان است و همانگونه كه در شكل زير مشاهده مى كنيد فقط دو سيم براى اتصال در كوادروتور دارند و اينكه ملخ هاى آنها نيز با يك فشار بر روى شافت موتور نصب مى شوند. استفاده از اين موتورها به دليل اينكه كاركردن با آنها آسان است و قيمت آنها نيز ارزان است از محبوبيت خاصى در بين شركت هاى سازنده كوادروتور برخوردار است.

نكته: موتورهاى كورلس ذكر شده صرفا در كوادروتورهاى تجارى و كوادروتورهايى با قابليت هاى پايين كاربرد دارند زيرا اين موتورها قابليت رقابت با موتورهاى براشلس را ندارند و همانگونه كه مى دانيد در كوادروتورهاى ريس از موتورهاى براشلس به جاى اين موتورها استفاده مى شود.
در شكل زير اجزاى داخلى اين نوع موتورها نشان داده شده است. همانگونه كه در شكل زير نيز مشاهده مى كنيد هيچ هسته آهنى در اين موتور وجود ندارد و سيم پيچ ها به صورت كاملا مستقل در داخل موتور قرار گرفته اند و كار چرخش را انجام مى دهند.

مزاياى موتور DC
1-دو سیم جهت راه اندازی آن نیاز است.
2-ارزان است.
3-کنترل آن اسان است.
3-برای سرعت های ثابت به هیچ کنترلری نیاز ندارد.
4- در شرایط نامساعد محیطی به دلیل نداشتن مدارات الکترونیک با دوام است.
معايب موتور DC
1-ساییده شدن جاروبک ها در اثر فشار
2- سروصدای زیاد
3-تولید نویز در اثرساییده شدن جاروبک ها
این جلسه هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.21k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
16.13k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.44k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.03k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
1.53k بازدید
17 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
با عرض درود چرا توی دروس جلسه سوم وجود نداره؟
سلام
جلسه سوم موجود هست. از لینک زیر نیز می توانید استفاده کنید.
https://robouav.org/quadcopter-frame/