فلایت کنترل APM {جلسه بیست و چهارم}
مقدمه اى بر فلایت کنترل APM
فلایت کنترل APM به دلیل دارا بودن ویژگی OPEN Source از محبوبیت بالایی برخوردار است.
کاربران محترم، خواندن اين جلسه بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
این فلایت کنترل را می توان در تمامی ربات های رادیو کنترلی همانند هواپیما، ماشین های کنترلی، هلی کوپتر، زیردریایی و مولتی روتورها استفاده کرد.فلایت کنترل APM را با نام های مختلفی همانند:
- آردوپایلوت(ArduPilot)
- آردوکوپتر(ArduCopter)
هنگامي كه در هلي كوپتر و مولتي كوپتر استفاده مي شود با نام آردوكوپتر خوانده مي شود.
- آردوپلن(ArduPlane)
هنگامي كه در هواپيما استفاده مي شود با نام آردوپلن خوانده مي شود.
- آردو روور(ArduRouver)
- هنگامي كه در ماشين استفاده مي شود با نام آردوروور خوانده مي شود.

در تمامی نام های بالا Ardu همان مخفف Arduino می باشد که پایه و اساس طراحی این فلایت کنترل می باشد. این فلایت کنترل قابلیت ساخت یک مولتی روتور کاملا خودکار را برای شما فراهم می کند. این فلایت کنترل در سالهای 2012 و 2014 برنده مسابقات UAV Outback Challenge شد. رویکرد نرم افزاری آردوپایلوت همانند PX4 و Papparazi می باشد. لغت APM مخفف Ardu Pilot Mega است.
قابلیت های فلایت کنترل APM
- سازگاری کامل با نرم افزار آردوینو
- قابلیت بازگشت به خانه با اتمام باتری یا قطع سیگنال یا هر مشکل دیگری
- قابلیت اتصال به شبیه سازها
- قابلیت کنترل با لب تاپ، گوشی، تبلت و… بدون استفاده از رادیوکنترل
- قابلیت اتصال به بلوتوث، تلمتری، وایفای و… جهت اتصال بدون رادیوکنترل
- جایروسکوپ، شتاب سنج و قطب نمای سه محوره به همراه فشارسنج
- دارای پورت USB میکرو جهت اتصال به کامپیوتر
- و قابليت هاي زيادي كه مي توانيد از راهنماي همراه برد مطالعه كنيد.
ورژن هاي فلایت کنترل APM از ابتدا

- APM 1
- APM 2
- APM 2.5
- APM 2.5.2
- APM 2.6
- APM 2.7
- APM 2.8
- APM 2.9
تفاوت ورژن های مختلف فلایت کنترل APM
فلایت کنترل APM با ورژن های مختلفی در بازار ارایه شده است که تغییرات زیادی را شاهد بوده است. در ابتدا که برد APM 2 معرفی شده بود کلیه تجهیزات و سنسورها همراه برد بودند. یعنی اینکه GPS و قطب نما روی برد اصلی بودند ولی در ورژن های جدید ابتدا GPS را جدا کردند(در ورژن APM2.5) و سپس قطب نما را هم از برداصلی جدا کردند(ورژن APM2.6) و به همراه GPS با کابل متصل می شدند. علت این جداسازی هم بیشتر به کاهش نویز بر میگردد بدین ترتیب برای وسایل و تجهیزات کنترلی که نیاز به دور بودن قطب نما و جی پی اس از منبع تغذیه و موتورها جهت جلوگیری از تداخل مغناطیسی می باشد از ورژن 2.6 به جای 2.5 استفاده می شود.
البته با بروز شدن این بردها و با ورود ورژن 2.8 تمامی مشکلات سری های قبلی حذف شد. هم اکنون ورژن 2.8 در فروشگاههاى داخلي در دسترس مي باشد. تكامل يافته فلایت کنترل APM نيز فلايت Pixhawk مي باشد كه قابليت هاى بسيار بيشترى نسبت به فلایت کنترل APM دارد.
نکته دیگری هم که قابل ذکر است اینه که شاید یکی نخاد از قطب نما و جی پی اس استفاده کنه یا اینکه نیازی به دقت بالا نداشته باشه و فقط بخاد با برد تنها راه اندازی رو انجام بده که در این صورت ورژن های جدید بسیار کاربردی تر و ارزان تر می شوند و نیازی به خریدن ماژول جی پی اس و قطب نما نیست.
شکل زیر نمایی از برد APM2 را نشان می دهد:

شکل زیر هم یک APM2.5 را نشان می دهد که GPS از روی برد جدا شده است:

شكل زير APM2.5.2 را نشان ميدهد.

اینکه جی پی اس از روی برد جدا شده است مزیت هایی دارد همانند اینکه دیگر شاهد نویزهای ناشی از ربات نیستیم و همچنین با جداسازی جی پی اس در صورت خرابی میتوان آن را به راحتی تعویض نمود ولی عیب آن این است که با توجه به اینکه جی پی اس و در ورژن های بالاتر قطب نما را از روی برد جدا کرده اند نیاز به کالیبره کردن دارد که باعث صرف زمان می شود.
تفاوت ورژن های APM2.5 و APM2.6
تفاوت های سخت افزاری
این دو ورژن از لحاظ سخت افزاری و سنسورها کاملا شبیه به همدیگر هستند و تنها تغییری که در سخت افزار APM2.6 به وجود آمده است این است که سنسور قطب نما به همراه ماژول GPS ارایه شده است و بدین ترتیب ماژول GPS مربوط به این دو ورژن با هم متفاوت است و بدین ترتیب APM2.6 قطب نمای داخلی روی برد اصلی ندارد.
- دو نوع ماژول GPS كه همراه بردهاي APM استفاده مي شود در زير نشان داده شده است.

- ماژول GPS از نوع Ublox

تفاوت نرم افزاری
از لحاظ نرم افزاری هیچ تفاوتی بین بردهای APM2.5 و APM 2.6 نیست و هر دو دارای فریمور یکسانی هستند.
از لحاظ قیمت
از نظر قیمت برد APM2.6 به دلیل مجزا بود GPS و قطب نما دارای قیمت بیشتری نسبت به APM2.5 است.
تفاوت ورژن های APM2.6 و APM2.8
در مورد این دو ورژن از لحاظ سخت افزاری اینکه سنسورهای هر دو برد تغییر چندانی نداشته است به جز اینکه یک سنسور قطب نمای داخلی به برد APM2.8 اضافه شده است. و بدین ترتیب تنها بردی که قطب نمای داخلی ندارد همان APM2.6 است.

در ورژن 2.6 یک مشکل اساسی سوختن رگولاتور ولتاژ 3.3 ولت بود که باعث میشد سنسورهای داخلی فلایت کنترل(شتاب سنج و قطب نما) از مدار خارج شوند. برای حل این مشکل شما باید هنگامی که فلایت کنترل روشن است به هیچ وجه هیچ سنسور یا قطعه ای رو به فلایت کنترل متصل نکنید یا از آن جدا نکنید. کلا هر نوع قطع یا اتصال سنسور ها را به بعد از جدا کردن باتری از فلایت کنترل محول کنید. راه حل دوم اینه که از فلایت کنترل APM2.8 استفاده کنید که این مشکل برطرف شده است.
از لحاظ قیمت هم تفاوت چندانی میانی این دو ورژن نیست.
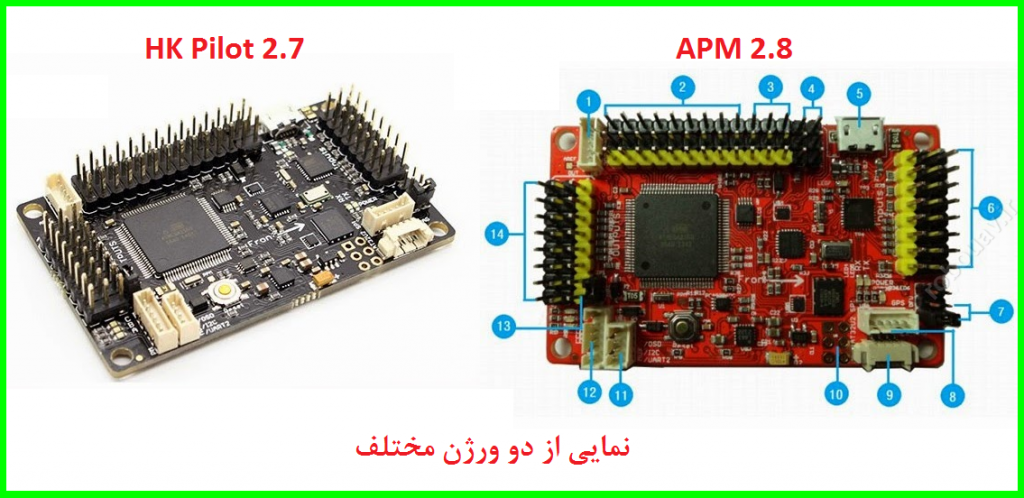
شکل زیر هم ورژن های 2.7 و 2.8 را نشان می دهد.
برای اتصال به کامپیوتر این بردها می توانید از پورت USB میکرو آن استفاده کنید و با یک کابل شارژر گوشی تان آن را به لب تاپ وصل کنید.
نکته: دقت کنید که پین های مربوط به پورت USB میکرو به صورت ظریفی روی PCB لحیم شده اند و هنگام جازدن و در آوردن کابل بسیار دقت کنید تا آسیب نبینند.

نكات كاربردي
در هنگام تهیه این برد با دو نوع متفاوت از پین هدرهای افقی و عمودی مواجه می شوید که بسته به نوع رباتتان می توانید از هرکدام استفاده کنید.

حتی الامکان سعی کنید برد را به همراه کاور اصلی آن استفاده کنید.
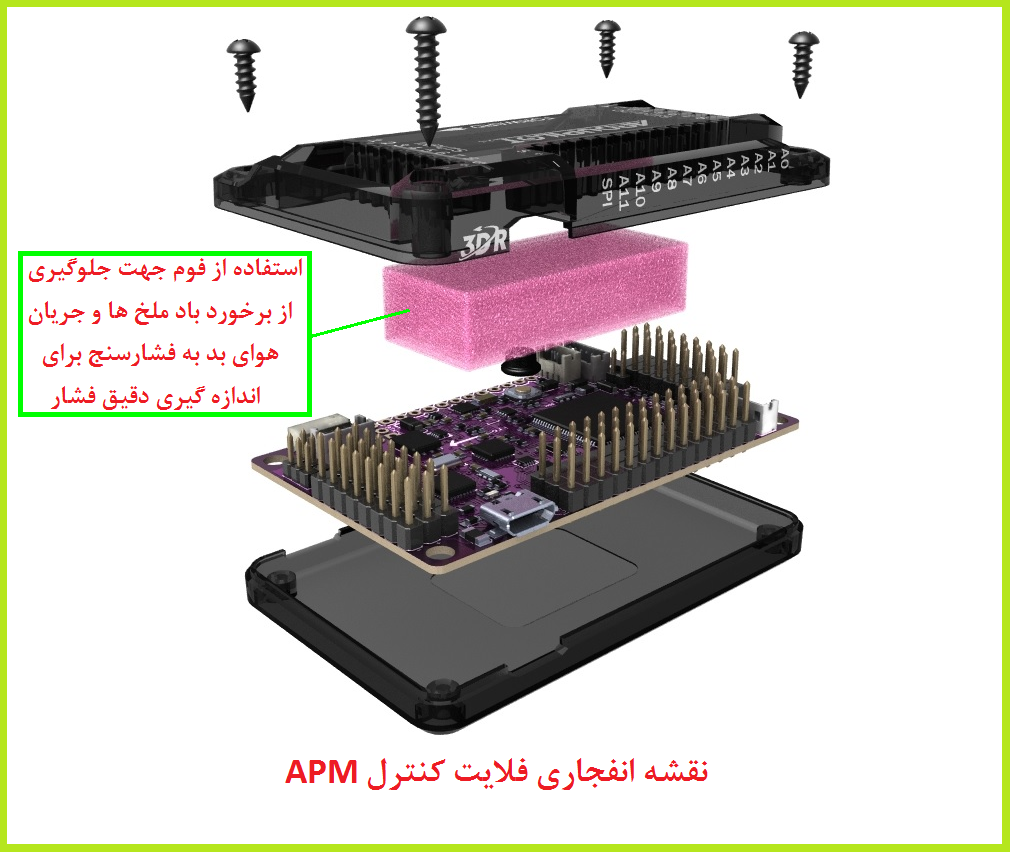
در صورتی که کاور مشکی رنگ فلایت کنترل را باز می کنید حتما بر روی فشارسنج(بارومتر یا Barometric Sensor نام انگلیسی آن است) یک فوم قرار دهید و آن را با یک لایه دیگری که جهت حفاظت از نور می باشد به طور مناسب نصب کنید. معمولا علت خطاي فشار سنج به دو دليل است:
- جريان باد متلاطم و همچنين باد ملخ ها كه اصطلاحا WASH ناميده مي شود.
- نور مستقيم آفتاب

دلیل اینکار هم این است که علاوه بر اینکه فشار باد ناشی از ملخ ها بر روی فشار سنج اثر می گذارد نور آفتاب هم باعث تغییراتی در داده های ارسالی از فشارسنج می شود. یعنی اینکه فشارسنج در معرض نور مستقیم آفتاب و سایه دو داده متفاوت را نشان می دهد که باید این موضوع مدنظر قرار گیرد و از پوشش مناسب استفاده شود.

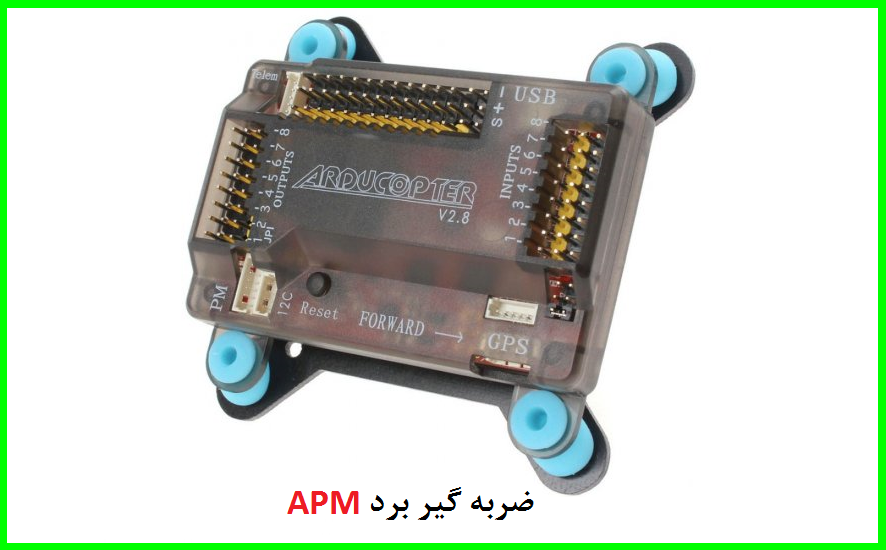
در هنگام نصب فلايت كنترل هم حتما از ضربه گير طراحي شده مخصوص اين برد كه با فيبركربن است استفاده كنيد و يا اگر نداريد از يك فوم به عنوان ضربه گير استفاده كنيد تا هم لرزش هاي اضافه را بگيريد و هم در صورتي كه از قطب نماي داخلي بعضي ورژن ها استفاده مي كنيد تداخل و نويز كمتري داشته باشد. دقت كنيد كه در زير برد از بكار بردن جنس هاي آهني همانند اسپيسر آهني و…خودداري كنيد و حتي الامكان از اسپيسر پلاستيكي و… استفاده كنيد.
نكته مهم: محل نصب فلايت كنترل را حتما در نزديكي مركز جرم قرار دهيد زيرا نوسان و لرزش در اين نقطه كمتر است. براي اطلاعات بيشتر در مورد مركز جرم به لينك زير مراجعه كنيد.
برای خرید فلایت کنترل APM می توانید از فروشگاههای زیر تهیه کنید. دقت کنید که این برد دارای نمونه های چینی و نمونه های اصلی است. نمونه ی چینی هم از کیفیت مناسبی برخوردار است و می توانید استفاده کنید. هر چند کیفیت به مراتب کمتری نسبت به برد اصلی دارند. لینک زیر صرفا در جهت کمک به کاربران می باشد و جنبه تبلیغاتی ندارد.
این جلسه هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.63k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
30.99k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.86k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.42k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2.07k بازدید
72 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
سلام آقای قاسمی
ببخشید یک سوال؛ اگر apm2.8 چراغ ابی چشمک زن داشته باشه به این معنی هست که gps داره؟
مدلی که من چندوقت پیش خریدم دقیقا این هست http://shop.aftabrayaneh.com/Flying_Robots/Aero_Controllers/Apm2_8_Flight_Control_Multi_Rotor_Ardupilot__AFTAB.html
میشه بفرمایید این مدل gps دارد یا خیر؟ و لطفا بفمایید این مدلی که خریدم کلا چه سنسور هایی دارد؟ ممنون از شما
سلام و احترام
در مورد فلایت کنترل APM2.8 سنسورهای آن را به طور کامل در جلسات راه اندازی APM ذکر کردیم. این فلایت دارای سنسورهای ژیروسکوپ-شتاب سنج-قطب نما-فشارسنج می باشد. در مورد GPS هم اینکه باید از یک جی پی اس خارجی برای آن استفاده کنید زیرا در حالت دیفالت فقط یک قطب نما بر روی فلایت کنترل قرار دارد و برای جی پی اس باید به صورت جداگانه خریداری شود. در هنگام خرید جی پی اس خیلی دقت کنید زیرا سوکت های مربوطه در مدل های مختلف متفاوت است و معمولا بعضی از وب سایت های فروش این نکته را ذکر نمی کنند. برای بقیه سنسورها همانند سونار و…نیز باید به صورت جداگانه خریداری کنید.
موفق باشید.
درود
ممنون از شما . میشه لطفا یک مدل gps خوب با قیمت مناسب پیشنهاد بدید؟
سلام جناب فتوت
لطفا در سایت های زیر جستجو کنید و بعد از مقایسه قیمت ها مدلی را انتخاب نمایید تا اظهار نظر شود.
1- http://shop.aftabrayaneh.com/
2- http://store.rahauav.com/
چنانچه در فروشگاهی دیگر نیز قیمت متفاوتی پیدا کردید ارایه نمایید تا بررسی شود.
اوکی .ممنونم
سلام آقای قاسمی
با توجه به اهمیت gps برای پهباد تصمیم گرفتم هرچه زودتر نسبت به خریدش اقدام کنم
یه برسی کلی توی فروشگاه ها انجام دادم
هم اکنون مورد زیر رو انتخاب کردم
ماژول GPS UBLOX NEO-7M همراه با قطب نما ویژه APM
اینم لینک خریدش در فروشگاه آفتاب رایانه
http://shop.aftabrayaneh.com/APM_Pixhawk_NEO_7M_GPS_Compass__AFTAB.html?search=gps
ممنون میشم نظر خودتون رو نسبت به این انتخاب بیان کنید . اگر موردی هست یا پیشنهادی دارید بفرمایید
فلایت APM2.8
سلام و خداقوت
در مورد خريد GPS دو نكته را خدمتتان عرض مي كنم:
1- از بين gps هايي كه در بازار موجود است دو مدل Ublox-6M وUblox-neo M8N گزينه هايي هستند كه مي توانيد استفاده كنيد. از بين اين مدل ها در شرايط نامناسب Ublox-neo M8N دقت بيشتري نسبت به Ublox-6M دارد زيرا M8N اين قابليت را دارد كه علاوه بر ماهواره هاي آمريكايي از ماهواره هاي روسي نيز بهره ببرد و البته در موقعيت هاي خاصي به ماهواره هاي چيني و اروپايي نيز دسترسي دارد و مي تواند موقعيت خود را در شرايط نامناسب دقيق تراعلام كند ولي NEO-6M فقط از ماهواره هاي آمريكا بهره مي برد و در مقايسه با رقيب خود كه دسترسي بيشتري به ماهواره ها دارد دقت كمتري در موقعيت هاي متفاوت از خود نشان ميدهد. البته اين دقت وابستگي زيادي به مكاني دارد كه GPS در آن قرار دارد به عنوان مثال كاربران روسي دقت بسيار بالاتري نسبت به ديگر كاربران دارند.
2- در صورتي كه قصد خريد آن را داريد حتما مطمعن شويد كه مخصوص همان فلايت كنترل مورد نظرتان باشد و دقيقا ورژني باشد كه شما نياز داريد. براي اينكار حتما با فروشگاه تماس گرفته و تعداد پين هايي كه به پورت GPS متصل مي شود را بپرسيد زيرا بعضي از فروشگاهها gps ها را براي ورژن هاي مختلف APM يا ديگر فلايت كنترلرها به فروش گذاشته اند و در شرح كالا توضيحي نمي دهند. مثلا پين هاي مربوط به پورت جي پي اس APM2.6 متفاوت با APM2.8 مي باشد بنابراين بايد ورژن GPS نيز متناسب با برد كنترلي تان باشد.
موفق باشيد
سلام مهندس قاسمی عزیز وقتتون بخیر باشه
ممنون میشم راهنماییم کنید چطور به سور کد APM دسترسی پیدا کنم
در واقع میخام سورس کد pixhawk رو تغییر بدم تا از سنسور فشار داخلی نخونه و از سنسور خارجی فشار رو بخونه و احتمال میدم روش دسترسی به سورس کد توی این دوتا فلایت یکی باشه
ممنون میشم راهنماییم کنید چطوری اینکار رو انجام بدم.
سلام
براي دسترسي به سورس كد فلايت كنترل APM مي توانيد از لينك زير استفاه كنيد و با كليك بر روي گزينه download كه در سمت راست صفحه است و با كادر سبز رنگ مشخص شده است فايل زيپ آن را دانلود كنيد. برنامه مربوط به APM را به راحتي مي توانيد با نرم افزار آردوينو باز كنيد و ويرايش كنيد. فشارسنج مورد نظرتان چيست؟
https://github.com/ArduPilot/ardupilot
موفق باشيد.
سلام کوادهای سه موتوره جهت چرخش ملخها کدوم سمته..اگه ممکنه شکلش رو نشون بدین.
سلام مجدد
لطفا جلسات اولیه کوادکوپتر را مطالعه بفرمایید اگر متوجه نشدید برایتان شرح می دهیم. طرح ها دوال کوپتر و تری کوپتر را مطالعه کنید.
موفق باشید
اندازه طول کواد50سانت__فاصله دوموتورعرضی 46 سانت __فاصله موتور انتهایئ با موتورهای چپ وراست 24سانت.