معرفی انواع موتور ها و مزايا و معایب هر كدام
مقدمه
موتورها بخش مهمی از ربات ها و اکثرتجهيزات اطراف ما رو تشکیل میدهند بنابراين ضرورى است كه به صورت كامل با اين اجزاى مهم آشنا شويم. ما در این جلسه سعی خواهیم کرد یک سری از موتورهای مهم رو بررسی کنیم.
معرفی مفاهیم لازم
يك موتور چگونه حركت مي كند؟
جواب اين سوال به يك مفهوم بنيادى گره مى خورد كه آشنايى با آن مى تواند بخش مهمى از سوال بالا را پاسخ دهد و آن هم مغناطيس است. در اينجا ما اين نيروى ساده را در يك ماشين شرح مى دهيم.

الکترومغناطیس
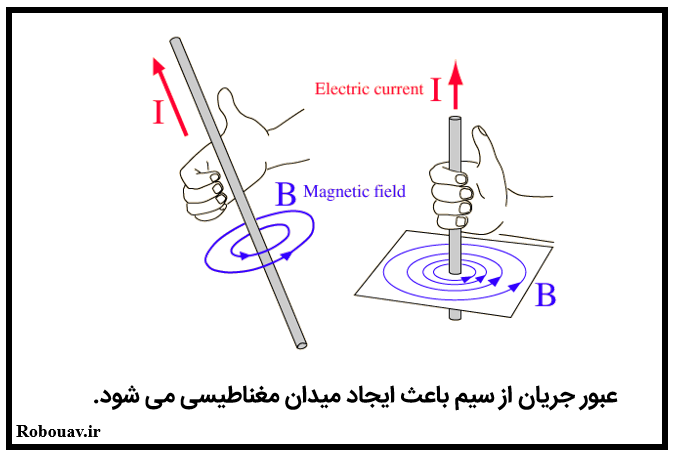
براي توضيح مغناطيس و ميدان مغناطيسى ما ابتدا بايد بدانيم چگونه توليد مي شود. ارتباط بين جريان و مغناطيس بر اساس قانون دست راست است. هنگامى كه يك جريان از درون يك سيم عبور مي كنيد يك ميدان مغناطيسى در اطراف سيم بوجود مى آيد كه در جهت بسته شدن انگشتان شما مى باشد. حالا اگر شما برعكس اين عمل را انجام دهيد يعنى اينكه يك سيم را از درون يك ميدان مغناطيسى عبور دهيد نيرويى بوجود مى آيد كه به نيروى لورنتز معروف است.
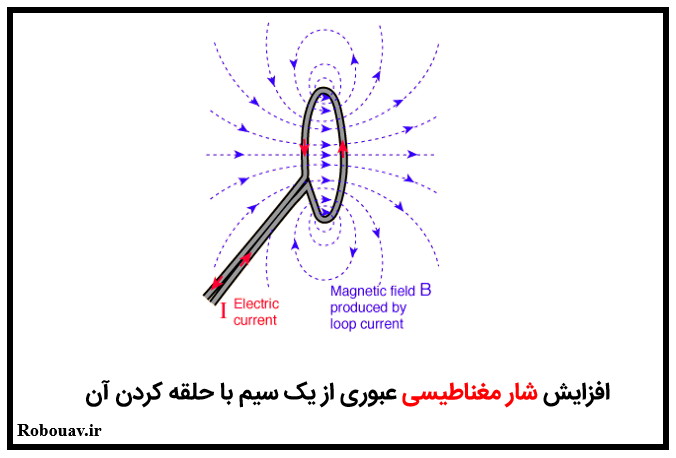
چنانچه جريان درون سيم بيشتر شود ميدان مغناطيسى ناشى از آن نيز بيشتر مى شود. چنانچه بك سيم حامل جريان را به صورت حلقه در آوريم اين ميدان هاى مغناطيسى همديگر را تقويت مى كنند و يك شار مغناطيسى زيادى را باعث مى شوند.
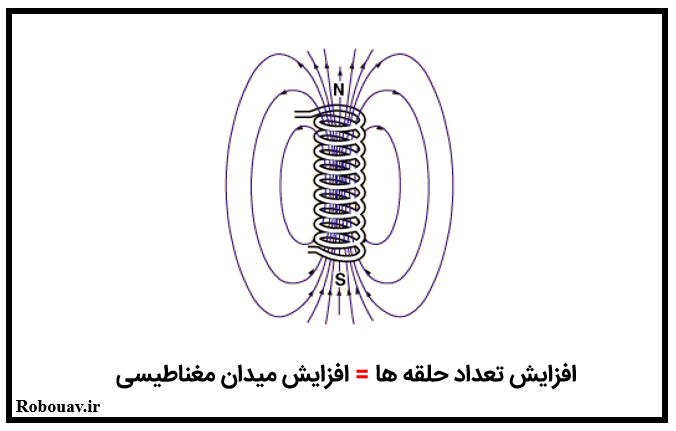
حال اگر تعداد اين سيم ها را افزايش دهيم به راحتى مى توانيم يك ميدان مغناطيسى بسيار قوى بوجود آوريم:
انواع موتورهای DC
موتورهای DC براش دار
اين موتورها ساده ترين نوع موتورها هستند كه در همه جا مى توان آن ها را يافت. اين موتورها ساختار ساده اى دارند و كنترل آنها هم بسيار ساده است.

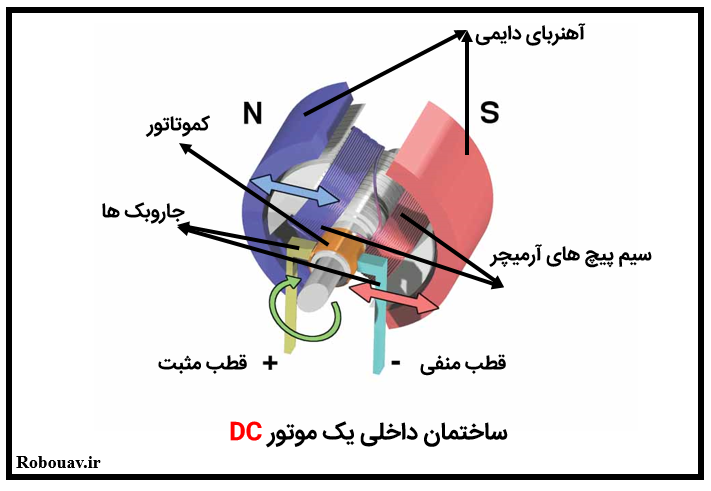
شكل زير قطعات باز شده يك موتور دي سي را نشان مي دهد.
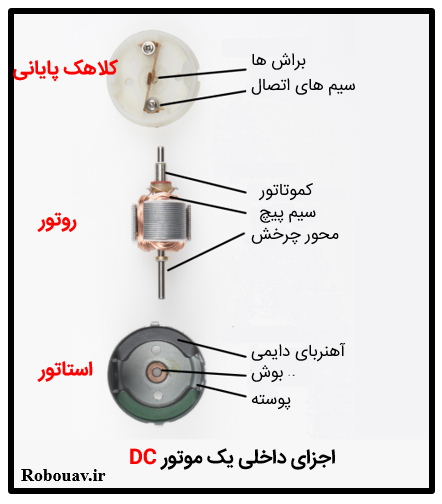
همچنين در شكل زير اين اجزا به صورت يكجا نشان داده شده است.
براى مطالعه جزئى تر موتورهاى دى سى به لينك زير مراجعه كنيد:
آشنايى با موتورهاى دى سى و ساختمان درونى آنها
موتورهاي براشلس

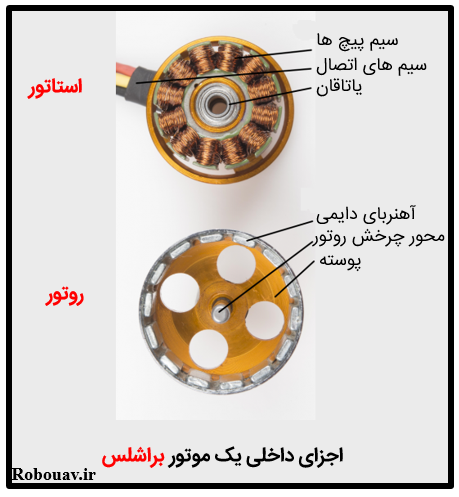
مواتورهای براشلس کلیاتش همانند موتورهای DC معمولیه ولی دیگه براش نداریم. در موتور های دی سی معمولی به دلیل داشتن جاروبک نمیتوان جریان زیادی به جاروبک ها اعمال کرد.چون باعث سوختن براش ها می شود. ولی این محدودیت در موتورهای براشلس نیست. در شکل زیر یک موتور بدون جاروبک را می بینید.

اجزاي داخلي موتور براشلس را درشكل زير مي بينيد.
نحوه عملكرد موتور
چرخش موتورهاي براشلس هم به نحوه برقدار كردن سيم پيچ هاي آن باز مي گردد. جريان متناوب روي سيم پيچ هاي آن باعث تغيير قطبيت سيم پيچ ها و چرخش مي شود.
به دو روش مي توان اين موتورها را كنترل كرد:
1- Back EMF
يعني با اندازه گيري ولتاژ روي سيم پيچي كه برقدار نيست. به انيميشن بالا دقت كنيد و ميبينيد كه هر بار يكي از سيم پيچ ها برقدار نيست و تغيير مي كند و ما ولتاژ اين سيم پيچ بدون برق را مدنظر قرار مي دهيم. موتورهای براشلس رو اصطلاحا موتورهای سه فاز هم می نامند. دو تاسیم که برای جریان استفاده میشه و یکی هم كه بدون برق است برای فیدبک به کار برده می شود.
2- Hall Effect Sensors
در موتورهای براشلس نوع جديد از سنسورهاي اثر هال با خروجی آنالوگ یا دیجیتال جهت تعیین موقعیت آهنربا استفاده می شود.

مزايا:
1-قابل اعتماد
2-پرسرعت
3-بازده بالا
معايب:
1-كنترل سخت
2-شروع با بار كم
3-نياز به گيربكس در درايوهاى خاص
براى مطالعه جزئى تر موتورهاى براشلس و ساختمان درونى آنها مى توانيد از دو لينك زير استفاده كنيد:
استپر موتور ( موتورهای پله ای)
استپر موتورها، موتورهاي بسيار عالي براي كنترل موقعيت هستند. این موتورها را می توان در پرینترهای سه بعدی، CNC و کلیه تجهیزاتی که نیاز به اندازه گیری دقیق موقعیت دارند یافت. استپرها یک قسمت خاص از موتورهای براشلس هستند. این موتورها برای با گشتاور زیاد ساخته می شوند تا در پیشروی مرحله به مرحله با دقت خوبی جلو روند که دیگر نیازی به انکودر نباشد. ساخت و کارکرد استپرموتورها بسیار آسان است.
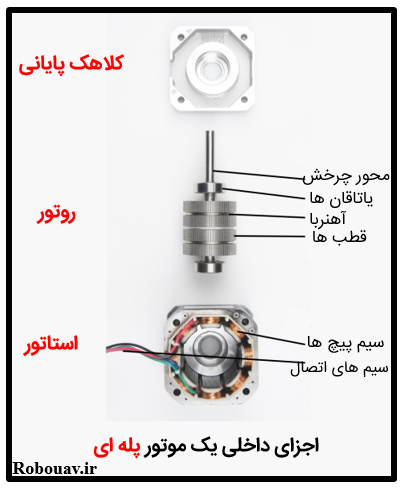
در شکل زیر اجزای داخلی یک استپر موتور را می بینیم.
شکل زیر انیمیشن عملکردی استپر موتور را نشان می دهد.
نحوه کار استپر موتورها همانند موتورهای براشلس است با این تفاوت که به قسمت های کوچکتری تقسیم شده است. تغییر در جریان سیم پیچ ها باعث چرخش درجه به درجه آن می شود. در شکل زیر می بینید که طراحی آهنربای دایمی با قسمت های ریز برای پیشروی های کوچک مشکل است و هزینه ساخت آن را بالا می برد.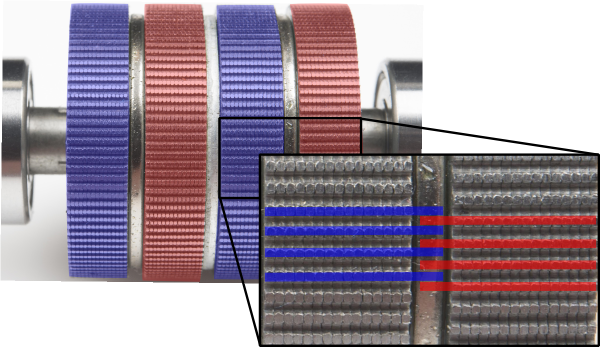
برای کنترل آن هم باید با مفاهیم اندوکتانس و سیم پیچ آشنا باشید.
مزایا:
1- دقت عالی در موقعیت
2- گشتاور بالا
3- قابلیت اطمینان بالا
4- سایزهای استاندارد
معایب:
1- محدود بودن سرعت به دلیل گام های کوچک آهنربا
2- حذف و در رفتن از موقعیت در سرعت های بالا
3-جریان زیاد
موتورهای خطی

موتورهای خطی موتورهای آینده هستند که همه جا را خواهند گرفت. در تمامی موتورهای بالا ما از حرکت دورانی استفاده می کردیم و موتور به صورت دورانی میچرخید ولی در موتورهای خطی حرکت به صورت خطی است و این یعنی اینکه سیستمی با حجم کمتر و بازده بالاتر. نگهداری از موتورهای خطی آسان است و چون فقط یک قطعه حرکت می کند قابلیت اطمینان بالایی دارند. این موتورها سرعت بالایی دارند و در هنگام کار با آنها باید مراقب بود.
در انیمیشن زیر نحوه کارکرد این موتور را می بینیم. دقت کنید که قطب های همنام آهنرباها روبروی هم قرار می گیرند و باعث دفع همدیگر می شوند.
مکانیزم کارکرد موتورهای خطی همانند موتورهای براشلس است. برای درک بهتر کافیه یک موتور براشلس رو بگیرید و بدنه استوانه ای شکل اون رو با اره و چکش صاف کنید تا مثل ریل بالا بشه بعدش قسمت داخلی رو مشابه بالا حرکت بدید. قسمت حرکت کننده بالا تنها قسمتی است که در موتور خطی حرکت می کند. در اینگونه موتورها از انکودر و دیگر ماژول ها برای موقعیت درست استفاده می شود
مزایا:
1- قابل اعتماد
2- سرعت بالا
3- بازده بالا
4- بدون نیاز به تبدیل سرعت دورانی به خطی
معایب:
1-گران
2- نیازمند به کنترلر های معمول
3- برای هر سیستمی نوع خاصی باید طراحی شود
برای دریافت آخرین مطالب سایت و همچنین مطالب منحصر به فرد دیگر که در سایت منتشر نمی شوند میتوانید در کانال تلگرام ما عضو شوید و یا در اینستاگرام ما را فالوو کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
157 بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
313 بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
171 بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
168 بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
218 بازدید
22 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
با عرض سلام، قصد ساخت ربات با قابلیت تحمل 4000 تن را داریم، موتور پیشنهاد شما چیست؟(با توجه به محاسبات توان مورد نیاز ما 6500 وات هست)
سلام و احترام.
لطفا نوع ربات خود را مشخص کنید.
متشکرم از پاسخدهیتان، یک ربات یدک کش هست با 4 چرخ، که 2 چرخ جلو هرزگرد و 2 چرخ عقب ثابت است، قصد دارم موتور ها را در چرخهای عقب قرار دهم. با توجه به محاسبات و طراحی های انجام شده بر روی هر یک از چرخ های عقب 1200 کیلوگرم (شعاع چرخ ها 0.1 متر فرض شده) قرار میگیرد. (این ربات پایین بار رفته، بار را بالا برده و آن را انتقال می دهد.)
سلام مجدد
در مورد رباتی که قصد ساخت آن را دارید مطالب بیان شده کمی گنگ به نظر می رسد. قصد استفاده از بار 1200 کیلوگرم بر روی یک چرخ 20 سانتی را دارید که قطعا با این موتورهای معمولی موجود در بازار نمی توان کاری انجام داد. موتور مورد نیاز شما موتورهای صنعتی است و این ربات نیز یک ربات صنعتی محسوب می شود. حتی چرخ و شافت و… هم که می بایست انتخاب کنید نیاز به استاندارد خاصی دارد. اگر طرح خاصی است یا عکسی از آن را دارید معرفی کنید تا جزییات بیشتری رد و بدل شود.
با آرزوی موفقیت برای شما
سلام
من برای ساخت یک اسکوتر برقی که مثلا وزن 70 کیلوگرم رو با سرعت 25 30 کیلومتر در ساعت حمل کنه
چه موتوری بهتر است استفاده کنم ؟
سلام و احترام
اگر منظورتان نوع موتور است كه موتورهاى براشلس مورد نياز داريد و بهتر است از موتورهاى براشلس استفاده كنيد و اگر هم برند خاصى از موتور براشلس مد نظر داريد بيان نماييد.
موفق باشيد
سلام خسته نباشید…برای یک ربات 70کیلو چ نوع موتوری با چ گشتاور و قطر شفت وطول و rpm جوابگو هست؟
سلام دوست عزیز
لطفا نوع ربات و کارهایی که از آن انتظار دارید را ذکر نمایید تا موتور مناسب پیشنهاد شود.
موفق باشید.
سلام دوست عزیز من میخواستم یکم درمورد سروو موتورها و سازینگ آن برای ربات ها بیشتر بدانم اگر بتوانید منبعی به من معرفی کنید یا خودتان اطلاعاتی به من بدهید ممنون میشوم
سلام
در زیر چندتا مطلب مفید به زبان انگلیسی براتون معرفی میکنم. ان شاالله فردا بخش سروو موتور در همین جلسه موتورها تکمیل می شود.
http://www.jameco.com/jameco/workshop/howitworks/how-servo-motors-work.htmlپ
http://www.electrical4u.com/what-is-servo-motor/
http://www.sciencebuddies.org/science-fair-projects/project_ideas/Robotics_ServoMotors.shtml
http://www.lirtex.com/robotics/servo-motors-information-and-control/
موفق باشید