آشنايى با مفصل ها و انواع شيوه هاى حركتى يك ربات{جلسه سوم}
مقدمه
به طور كلى شيوه هاى حركتى يك ربات به دو صورت انجام مى گيرد:
- حركت خطى
- حركت دورانى
در زير با اين دو نوع شيوه هاى حركتى يك ربات به طور كامل آشنا مى شويم.
حركت خطى
همانطور كه از نام اين حركت پيداست حركت در امتداد يك خط صورت ميگيرد. به شكل زير دقت كنيد.

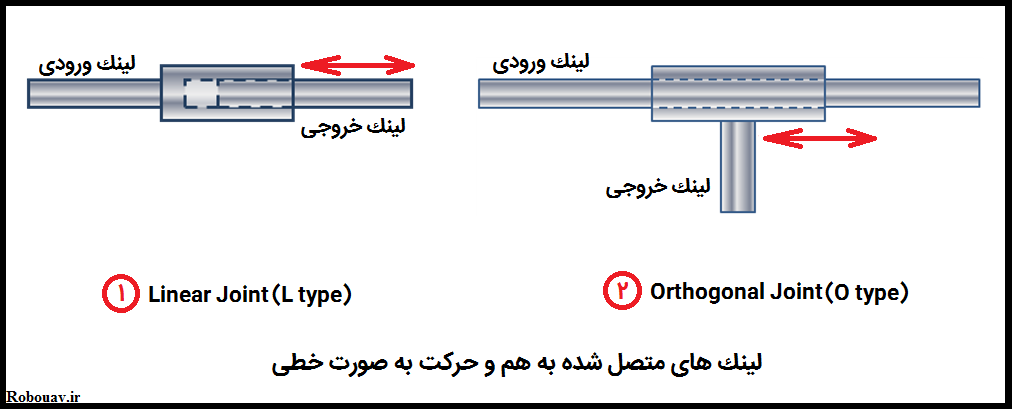
در مورد حركت خطى همانطور كه از نامش پيداست ربات يا اجزاى ربات به صورت خطى حركت مى كند. از آنجايى كه هر رباتى براى حركت خود همانند ما انسان ها نياز به مفصل و دست و پا و بقيه موارد دارد بايد براى آنها انواع دسته بندى مفصل هايشان را انجام داد. حركت خطى در مفصل هاى ربات را به دو بخش تقسيم مى كنيم:
- مفصل هاى خطى(Linear Joints)
- مفصل هاى قائم(Orthogonal Joints)
منظور از مفصل هاى خطى يا به اختصار نوع L يعنى اينكه دو مفصل كنار هم به صورت خطى درون يكديگر حركت مى كنند. همانطور كه در شكل زير مشاهده مى كنيد دو مفصل به وسيله يك شيار در درون يكديگر حركت مى كنند. ما اينگونه مفاصل را با نوع L مى شناسيم و در بخش هاى بعدى هر جا از نوع L سخن به ميان آمد منظورمان به صورت زير است. در شكل زير ما از اصطلاح لينك استفاده كرده ايم كه منظور همان اهرم ها مى باشند. پس هر جا از عبارت لينك ورودى استفاده شد منظور همان اهرم ورودى است و هر كجا هم از عبارت لينك خروجى استفاده شد منظور همان اهرم خروجى است. البته هر اسم ديگرى همانند عضو يا…نيز مى توانيد به كار ببريد.
حركت دورانى
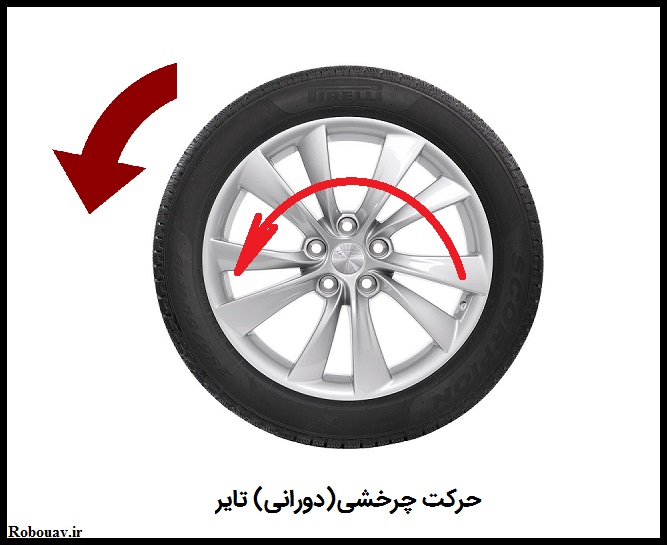
در اين نوع حركت ربات با استفاده از مفصل هايى كه دارد يك حركت دورانى را انجام مى دهد. ساده ترين مثال براى اين نوع حركت را در زير مشاهده مى كنيد. تاير ماشين به دور خود مى چرخد و يك حركت دورانى را رقم مى زند.
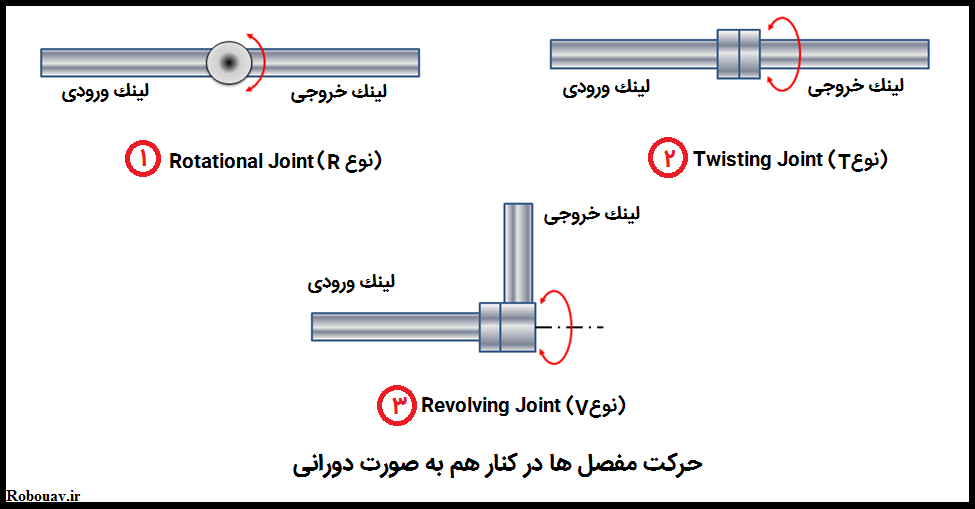
مفصل هاى چرخشى هم به صورت سه نوع زير و يا تركيبى از آنهاست. اين مفصل ها همانند زانوى انسان عمل نموده و حركات را براى يك ربات هموار مى كنند. اين مفصل ها را به اختصار با نام هاى L، T، V مشخص مى كنيم.
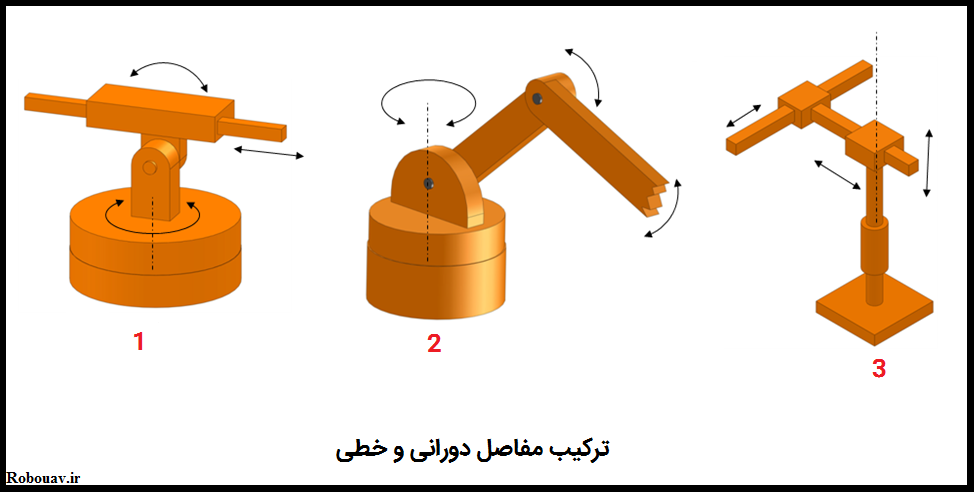
در شكل زير مفصل هاى دورانى و خطى را مشاهده مى كنيد كه با هم تركيب شده اند تا حركات خاصى را انجام دهند. بسته به اينكه از چه نوع رباتى استفاده مى كنيد و يا اينكه قصد ساخت چه نوع رباتى را داريد اين مفصل ها با هم تركيب مى شوند.
درجه آزادى يك ربات
درجه آزادى يك ربات بدين معنى است كه يك ربات در چند جهت مى تواند حركت كند. به طور كلى ما در شش جهت مى توانيم حركت كنيم يعنى تمامى موجودات روى كره زمين فقط در شش جهت قابليت حركت دارند و اين بدين معنى است كه يك ربات نيز حداكثر مى تواند شش درجه آزادى داشته باشد. اين شش درجه آزادى به صورت زير است كه در شكل نشان داده ايم.
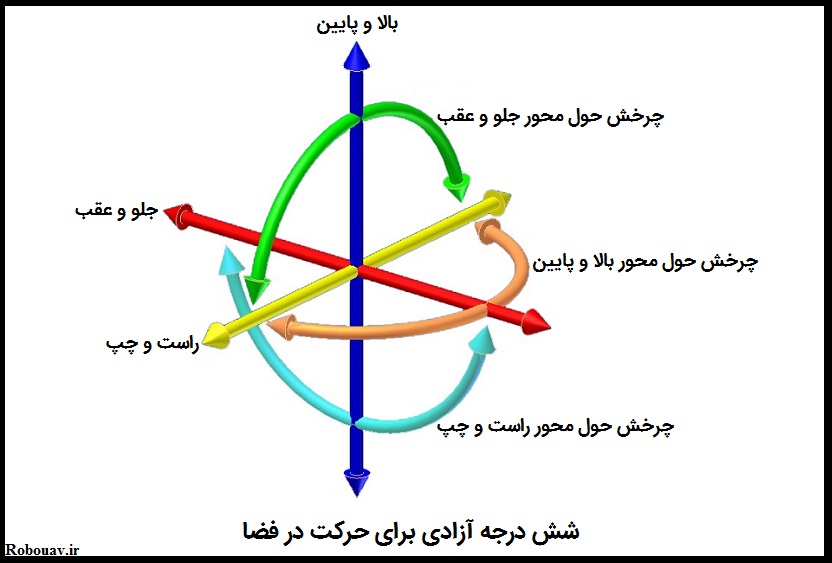
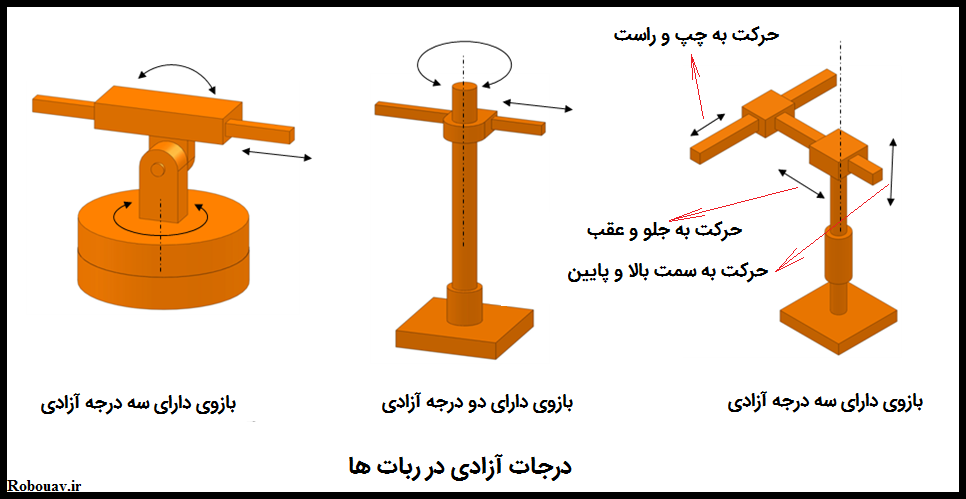
همانطور كه در شكل بالا مشاهده مى كنيد حركت به سمت بالا و پايين يك درجه آزادى محسوب مى شود. فرض كنيد يك بازوى رباتيكى داريد كه به سمت بالا و پايين حركت مى كند اين يك درجه آزادى است و وقتى به سمت چپ و راست حركت مى كند باز هم يك درجه آزادي به آن اضافه مى شود و تا اينجا داراى دو درجه آزادى است حال اگر بتواند به سمت جلو و عقب نيز حركت كند داراى سه درجه آزادى است و اگر بتواند در جهت سه گانه نشان داده شده در شكل بالا نيز حركت كند داراى شش درجه آزادى در فضا است. در شكل زير درجات آزادى سه بازو را نشان داده ايم.
براى اينكه زياد وارد مباحث تئورى نشويم از بحث هاى حاشيه اى خوددارى مى كنيم و به ذكر نكته زير بسنده مي كنيم:
نكته: براى شمارش درجات آزادى يك سيستم كافى است به صورت ذهنى با دست خود اهرم ها يا همان لينك ها را يكي يكى بگيريد. شكل بالايى كه روى بازوهاى آن حركات به سمت بالا و پايين و غيره را نوشته ايم اگر با يك دست حركت به سمت بالا و پايين را مهار كنيم يا به هم جوش دهيم ديگر ربات فقط در دو جهت جلوعقب و چپ و راست مي تواند حركت كند بنابراين يك درجه آزادى آن از بين مى رود و فقط داراى دو درجه آزادى است و چنانچه با دست ديگر اهرمى كه جلوعقب مى شود را مهار كنيم يك درجه آزادى ديگر نيز از بين مى رود و ربات فقط يك درجه آزادى دارد كه به چپ و راست برود و در نهايت اگر اين اهرم آخرى نيز مهار كنيم ديگر ربات نمى تواند حركتى انجام دهد زيرا تمامى درجات آزادى آن از بين رفته است. همانطور كه مشاهده كرديد ما با استفاده از سه بار مهار كردن اهرم هاى ربات بالا توانستيم آن را از حركت باز داريم بنابراين اين ربات داراى سه درجه آزادى است.
اين جلسه هم به پايان رسيد. براى آگاهى از جلسات آينده و مطالبى كه در كانال منتشر مى شوند مى توانيد ما را در محيط هاى مجازى دنبال كنيد.
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.18k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
15.11k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.42k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.01k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
1.51k بازدید
4 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
یا سلام
مطالبتان بسیار مفید و کارآمد بود.
لطفا منابعی نیز جهت مطالعه بیشتر معرفی کنید.
خواهش ميكنم. در مطالب بعدي منابع بيشتري معرفي مي شود
سلام . خواستم تشکر کنم . مطالب بسیار مفید و گویا هستند .
از ابراز لطف شما سپاسگذاريم. با آرزوى موفقيت براى شما