مفهوم PWM و كاربرد آن در دنياي الكترونيك
مقدمه
در ادامه آموزش های الکترونیک به زبان ساده میخواهیم موج های PWM را بررسی کنیم. يك وسيله ديجيتال همانند ميكروكنترلر به راحتي مي تواند با ورودي ها و خروجي هاي دو حالته كه همان 0 و 1 يا همان on و off مي باشد كار كند و مثلا مي توانيد براحتي با استفاده از آن يك LED را روشن و خاموش كنيد ولي در بعضي مواقع شما به چيزي بيشتر از حالت كنترلي on و off نياز داريد مثلا مي خواهيد روشنايي يك LED را كنترل كنيد يا اينكه بخواهيد سرعت يك موتور DC را كنترل كنيد كه فلسفه بوجود آمدن PWM است.
تکنیک PWM تكنيكي است كه با استفاده از آن مي توان سيگنال هاي ديجيتال را به آنالوگ تبديل كرد.
اين عبارت مخفف Pulse Width Modulation مي باشد كه به معناي مدولاسيون پهناي پالس مي باشد. PWM يك اصطلاح براي يك نوع از سيگنال ديجيتال مي باشد كه در مدارهاي مختلف براي كنترل استفاده مي شود. يك وسيله ديجيتال همانند ميكروكنترلر فقط ميتواند دو سطح كنترلي HIGH=5v و LOW=0V را توليد كند حال اگر خواستيم ولتاژ 2.5 ولت و يا 3 ولت و يا هر ولتاژي بين 0 و 5 ولت توليد كنيد از PWM استفاده مي كنيم.
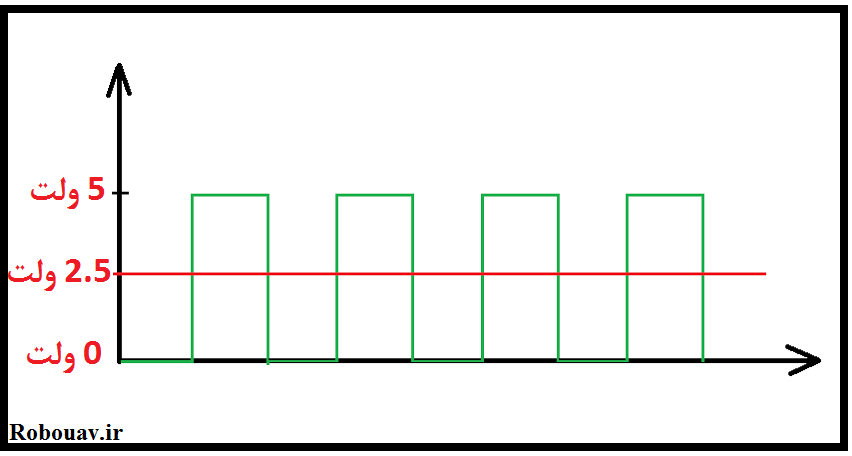
به عنوان نمونه می خواهيم ولتاژ 2.5 ولت توليد كنم كه براي اينكار از يك موج مربعي كه نصف آن 0 ولت است و نصف ديگر آن 5 ولت است استفاده مي كنيم. فرض كنيد يك موتور DC داريم كه ولتاژ 0 ولت به آن داده ايد كه قطعا روشن نمي شود! حال ولتاژ 5 ولت به آن مي دهيم كه با تمام سرعتش خواهد چرخيد!
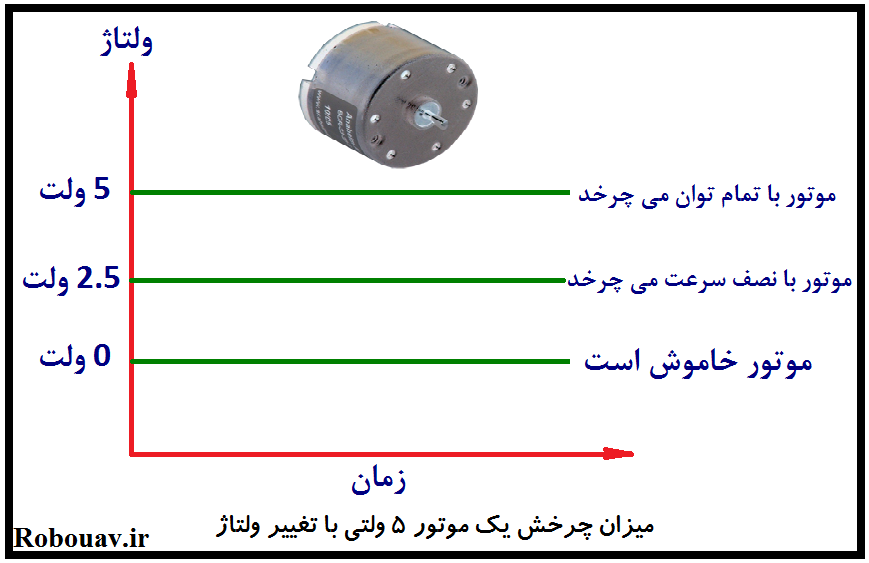
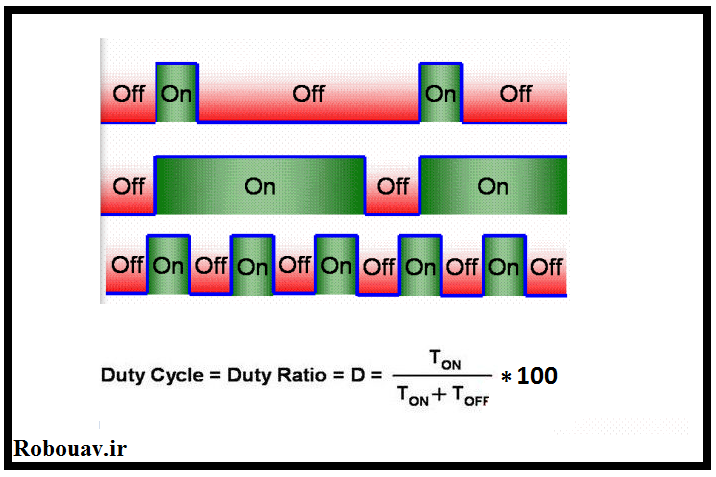
حالا به شكل زير دقت كنيد كه نصف دوره ولتاژ 0 ولت و نصف دوره ولتاژ 5 ولت داريم. به اين ميزان درصد روشن خاموش بودن Duty Cycle يا ديوتي سايكل مي گوييم. در اينجا ديوتي سايكل ما 50 درصد است. درصد زماني 1 بودن پين خروجي را Duty time مي نامند.
به همين ترتيب هر ولتاژي را مي توانيم با استفاده از فرمول ديوتي سايكل توليد كنيد.
Ton: مدت زمان روشن بودن يا همان 1 بودن
Toff: مدت زمان خاموش بودن يا همان صفر بودن
T = Time Period = Ton + Toff
حالا يك موتور داريم و مي خواهيم با ديوتي سايكل 50 درصد طبق نمودار بالا راه اندازي كنيم. فرض كنيد دوره ميكروكنترلر 20 ميكروثانيه باشه يعني Ton+Toff=20 باشد. بدين معني كه موتور 10 ميكروثانيه با تمام سرعت ميچرخه و 10 ميكروثانيه خاموش ميشه!!! يعني موتور ما تا بخواد وايسه دوباره بهش ولتاژ ميرسه و شروع به چرخش ميكنه و اين روند ادامه پيدا ميكند و مشابه اين است كه يك ولتاژ 2.5 ولت به موتور بدهیم. دقت كنيد موتور به خاطر ساختار دروني و اصطكاك و…در آن مدت زمان 10 ميكروثانيه به طور كامل متوقف نميشود و تا بخواهد متوقف شود دوباره ولتاژ از راه می رسد و شروع به چرخش می کند. حالا اگر يك ديوتي سايكل ديگر مانند 40 درصد به موتور بديم يعني اينكه موتور با 0.4 سرعت نامي شروع به چرخش ميكنه چون 0.4 ولتاژ نامي را استفاده مي كند كه معادل 2ولت است و با سرعت كمتري مي چرخد.
با استفاده از همين تكنيك مي توانيم نور يك لامپ را كنترل كنيم.
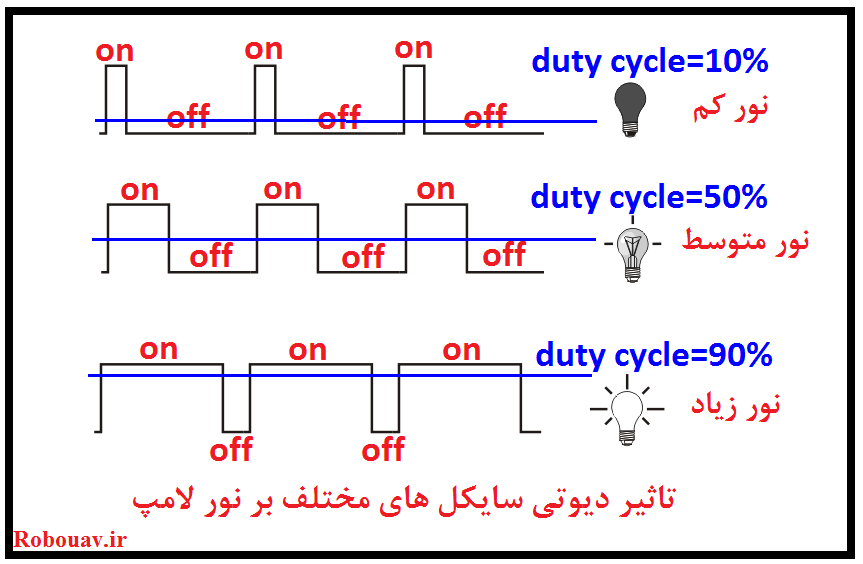
شكل زير انيميشن حالت هاي مختلف ميانگين گيري در PWM را نشان مي دهد.
نحوه ساخت موج PWM
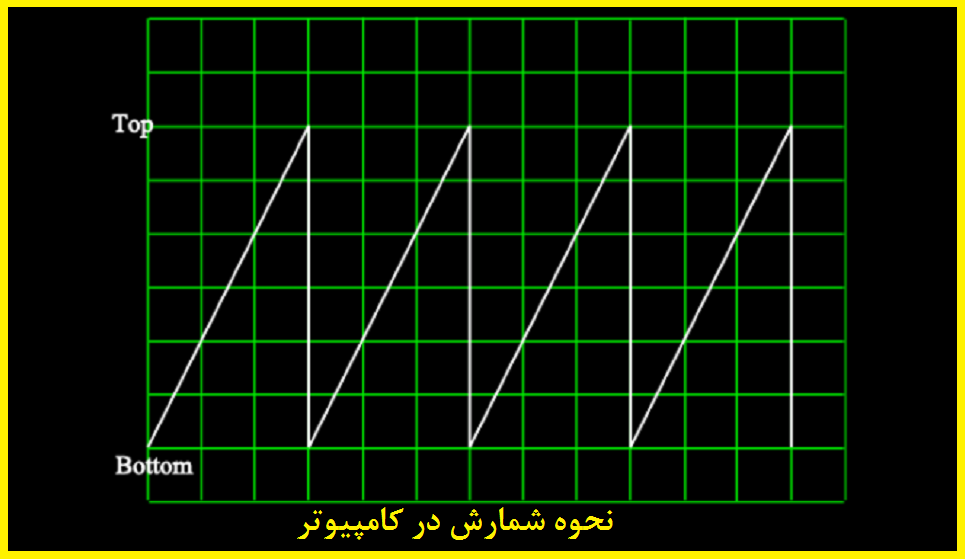
قبل از اينكه نحوه ساخت يك موج PWM رو توضيح بديم در مورد نحوه توليد اطلاعات و برنامه ريزي در كامپيوتر بحث ميكنيم. واقعيت اينه كه كامپيوتر اطلاعات رو به صورت 0 و 1 به ما نشون ميده ولي در عمل كامپيوتر از 0 شروع به خواندن ميكنه و همينطور اين مقادير را افزايش مي دهد تا به مقدار ماكزيمم خود برسد و دوباره به حالت اول برگردد يعني اينكه حالتي مشابه موج دندانه اره اي را دارد.
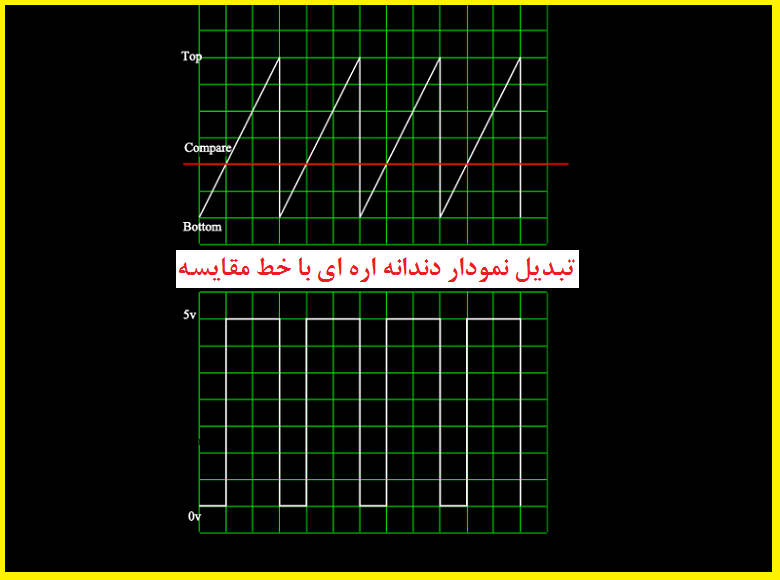
حالا براي نمايش اعداد 0 و 1 كامپيوتر از يك خط مقايسه استفاده مي كنه و آنهايي كه بالاي خط مقايسه هستند را با سطح ماكزيمم 1 نشان مي دهد و آنهايي كه در زير خط مقايسه قرار مي گيرند را با 0 نشان ميدهد. شكل زير گوياي همه چيز است.

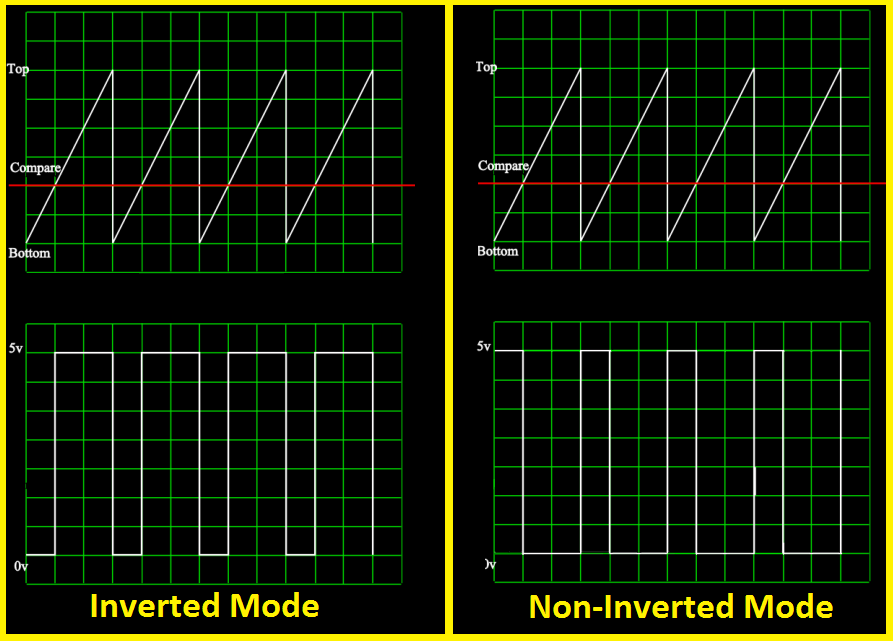
البته شكل دندانه اره اي بالا را به يك صورت ديگر هم مي توانيم تبديل كنيم كه عكس حالت بالا است يعني قسمتي از نمودار كه بالاي خط مقايسه هستند را با سطح ماكزيمم 0 نشان مي دهد و قسمتي كه در زير خط مقايسه قرار مي گيرند را با 1 نشان ميدهد و به آن Non-Inverted Mode مي گويند. شكل زير نحوه رسم اين دونوع را در كنار هم نشان مي دهد.
مدهاي كاري PWM
سه تا مد كاري براي PWM داريم:
-
Fast PWM
-
Phase Correct PWM
-
Phase and Frequency Correct PWM
مد سريع به اين مفهومه كه اگر يك سطح مقايسه اي رسم كرديم به محض رسیدن به سطح مقایسه ای، سریعا سطح سیگنال خروجی عوض میشه يعني اينكه اگر خروجی یک است میشه صفر و اگه صفر است یک ميشه.
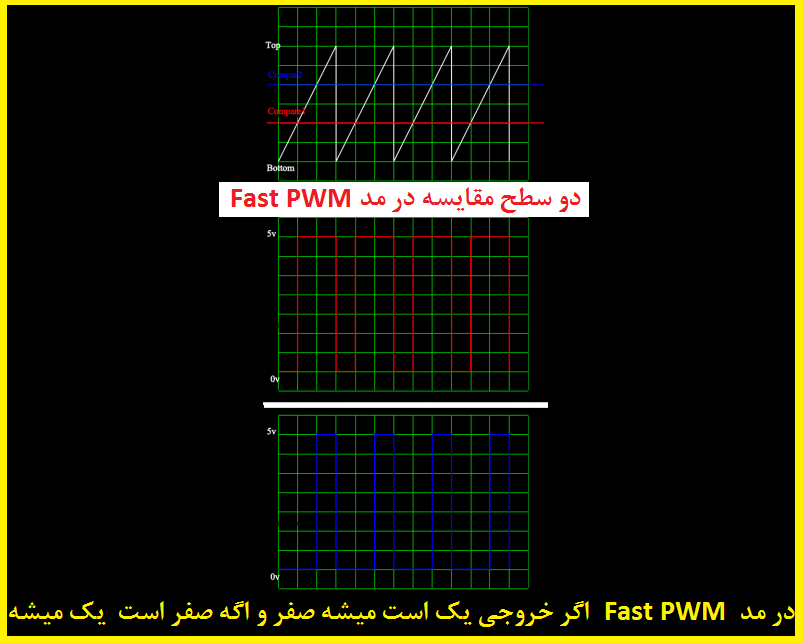
نكته مهم اينه كه در هر دو نمودار رسم شده سطوح مقايسه اي نقاط پاياني هر دوره در يك نقطه يكساني قرار دارند يعني اينكه هم فازند.
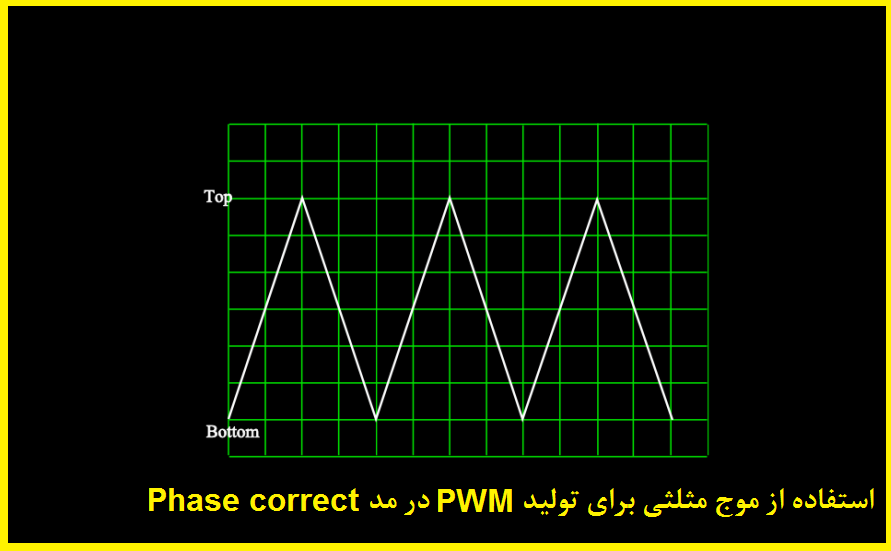
در اين مد كه مد تصحيح فاز ناميده مي شود از موج دندانه اره اي استفاده نمي كنيم و از موج مثلثي براي توليد PWM استفاده مي كنيم.
براي اين مد دو سطح مقايسه اي را در نظر گرفته ايم كه به صورت زير است.
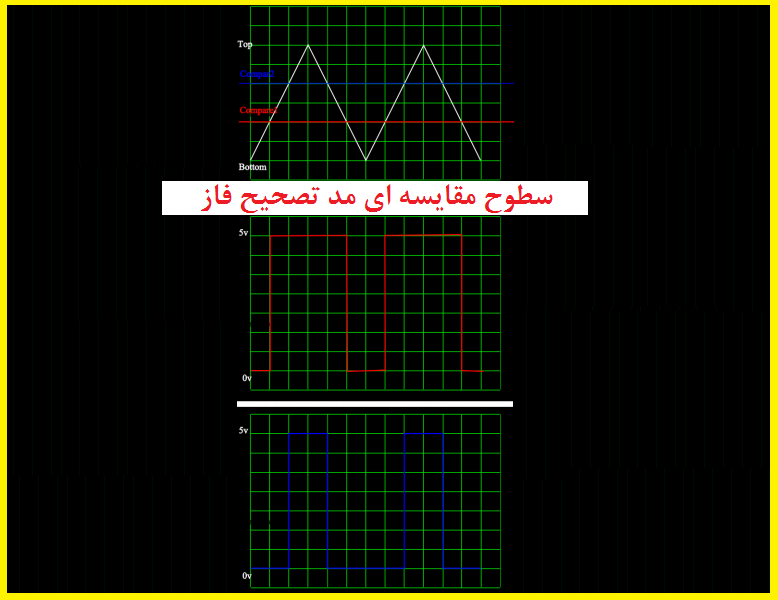
همانگونه كه مي بينيد پالس هاي آبي و قرمز ديگر انتهاي يكساني ندارند ولي پالس هاي آبي دقيقا در مركز پالس هاي قرمز هستند كه باعث مي شود خطاهاي موقعيتي مربوط به كنترل در حالت Fast PWM به حداقل برسد پس پيشنهاد مي گردد براي كنترل دور موتورهاي DC از مد Phase correct به جاي Fast PWM استفاده شود.
اگر به شكل بالا دقت كنيد متوجه مي شويد كه دوره در مد Phase correct دو برابر مد Fast PWM است كه با توجه به تعريف دوره و فركانس و معكوس بودن آنها فركانس مد Fast PWM دو برابر مد Phase correct است.
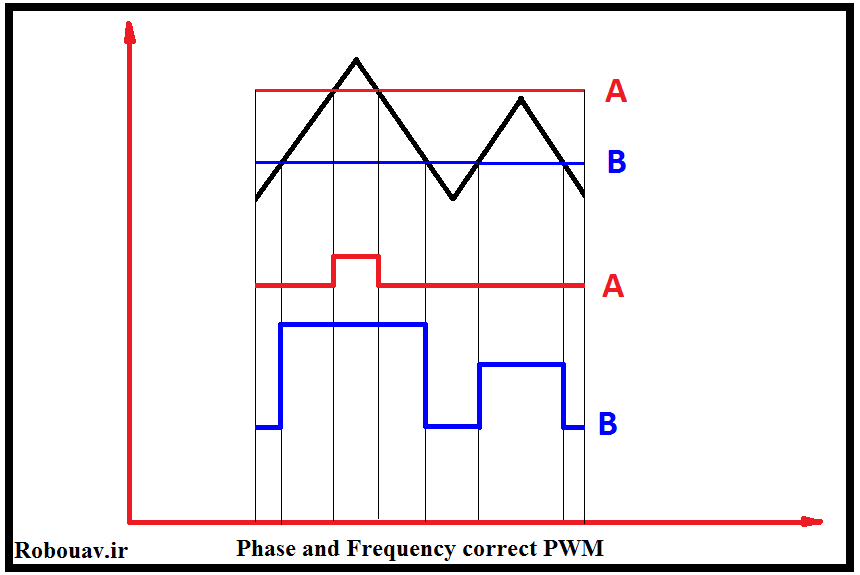
در اين مد مشاهده مي شود كه سطوح مربوط به موج مثلثي داراي ارتفاع نابرابر هستند و تفاوت هاي زيادي ايجاد ميشود كه در شكل هاي ترسيم شده مشاهده مي كنيد.
این جلسه نیز به پایان رسید. برای دریافت آخرین مطالب سایت و همچنین مطالب منحصر به فرد دیگر که در سایت منتشر نمی شوند میتوانید در کانال تلگرام ما عضو شوید و یا در اینستاگرام ما را فالوو کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.59k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
29.1k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.79k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.37k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2k بازدید
11 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
درود و سپاس بابت مطالب بسیار جالبتون.
میشه لطفا بیشتر توضیح بدید که برابر بودن فاز به چه دردمون میخوره و کجا کاربرد داره. و همینطور قسمت سوم مد فرکانس و فاز چه کاربردی داره
با سلام خدمت شما.
هر کدام از این مدها کاربردهای خاص خود را دارند. مد phase correct pwm برای نمونه برداری از جریان الکتریکی کاربرد دارد که میتوان از میانه پالس برای این کار استفاده کرد. مد سوم نیز برای مواردی است که با قطعه ای با بازه فرکانسی روبرو می باشیم. مثلا برای راه اندازی یک IGBT میتوانیم از این مد استفاده کنیم.
موفق باشید.
بسیار عالی ولی کم بود . چرا چیزهای خوب کم اند !؟
بسیار سپاسگزارم
سپاس از لطف شما.