جایروسکوپ و انواع آن{جلسه بیستم}
جايروسكوپ
 سنسورهای زیادی استفاده میشود تا بتوانند جهت گیری و موقعیت یک جسم را تعیین کنند مهمترین این سنسورها جایروسکوپ و شتاب سنج است و هنگامی که باهم ترکیب می شوند اطلاعات بی نظیری را ارایه میکنند. در این جلسه ما به طور کامل جایروسکوپ را توضیح می دهیم. براى دسترسى به جلسه قبل مى توانيد از لينك زير استفاده كنيد:
سنسورهای زیادی استفاده میشود تا بتوانند جهت گیری و موقعیت یک جسم را تعیین کنند مهمترین این سنسورها جایروسکوپ و شتاب سنج است و هنگامی که باهم ترکیب می شوند اطلاعات بی نظیری را ارایه میکنند. در این جلسه ما به طور کامل جایروسکوپ را توضیح می دهیم. براى دسترسى به جلسه قبل مى توانيد از لينك زير استفاده كنيد:- اسپيدكنترل و بردهای تقسيم ولتاژ {جلسه هجدهم}
کاربران محترم، خواندن اين جلسه بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
عوامل زيادي هستند كه باعث ناپايداري كوادكوپتر مي شوند كه يكي از آنها عدم تعال وزني ربات است و نصب نامناسب قطعات كه باعث مي شود مركز ثقل پرنده در وسط نباشد. يكي ديگر از اين عوامل باد است. هنگامي كه ربات در معرض باد قرار مي گيرد دچار ناپايداري مي شود كه بايد با استفاده از جايروسكوپ و شتاب سنج آن را اصلاح كرد.
نكته: دقت كنيد كه دو نوع باد باعث برهم خوردن تعادل كوادكوپتر مي شود.
1-باد ناشي از شرايط آب و هوايي
2- باد ناشي از چرخش ملخ ها و برخورد آن به زمين و ايجاد جريان گردابي
جایروسکوپ چیست؟
در تمامی اجسام در حال حرکت میزان تغییرات موقعیت جسم برای ما امری مهم و حیاتی است. جایروسکوپ یک وسیله مهم برای هدایت و اندازه گیری سرعت زاویه ای است. یک جایروسکوپ حداکثر سه سرعت زاویه ای را اندازه می گیرد.
بطور کلی 3 نوع جایروسکوپ داریم:
- جایروسکوپ های چرخشی(کلاسیک)
- جایروسکوپ های ارتعاشی
- جایروسکوپ های نوری
جایروسکوپ چرخشی(کلاسیک)
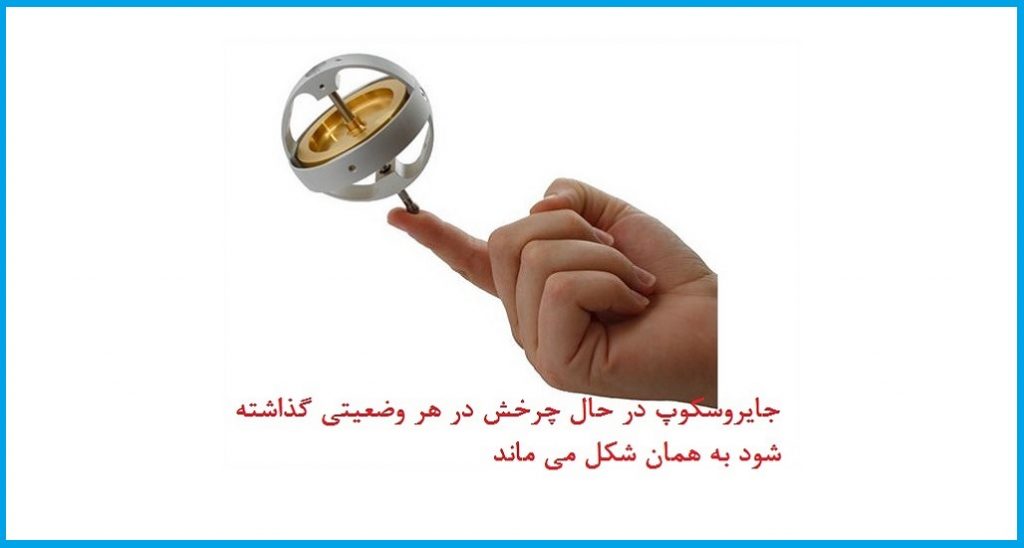
جایروسکوپ های کلاسیک از یک دیسک چرخشی که روی یک محور نصب شده است و روی یک گیمبال هستند تشکیل شده است. سه تا گیمبال داریم که هر کدام یک درجه آزادی را برای این دیسک چرخشی فراهم می کنند. یعنی اینکه این گیمبال به دیسک چرخشی وسط اجازه می دهند تا آزادانه برای خود بچرخد بدون آنکه نیروهای خارجی اثری بر آن بگذارند. شکل زیر را نگاه کنید که سه تا حلقه در اطراف دیسک چرخشی است و نیروهای اطراف دیسک چرخشی را خنثی می کنند و با چرخش خود اجازه نمی دهند که نیروهای خارجی اثری بر روی دیسک چرخشی بگذارند.
تا زمانی که دیسک در حال چرخش است نیروهای خارجی خنثی می شوند و در هر مکانی می ماند!
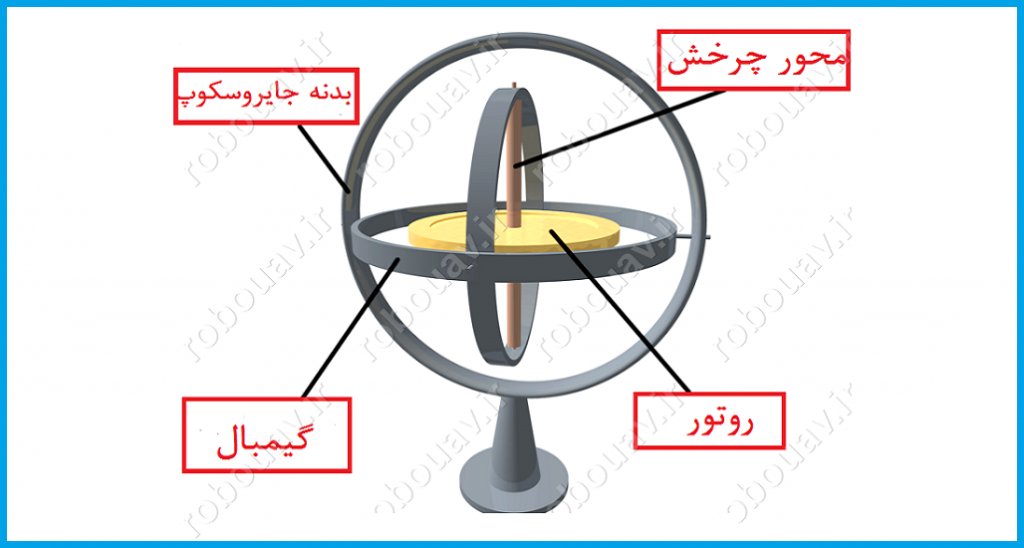
اجزاي جايروسكوپ
در شکل زیر اجزای تشکیل دهنده یک جایروسکوپ را مشاهده می کنید.
هنگامی که اجسام حول یک محور می چرخند دارای سرعت زاویه ای هستند. در شکل زیر یک چرخ حول یک میله در حال چرخش است که باعث شده است دارای سرعت زاویه ای باشد.
این چرخش حول محور با واحد RPS که مخفف Revolution Per Second است و یا Degrees Per Second می باشد که واحد آنS/° است که همان درجه بر ثانیه است.
اگر جایرو سه محوره زیر را به چرخ بالا بچسبانیم می توانیم سرعت زاویه ای چرخ حول محور Z را اندازه گیری کنیم. در جهت های X و Y چون هیچ سرعت زاویه ای نداریم مقدار صفر را نشان می دهد. چنانچه چرخ بالا در هر ثانیه یک دور کامل بزند سرعت زاویه ای آن 360 درجه بر ثانیه خواهد بود. همچنین جهت چرخش چرخ نیز مهم است یعنی اینکه جهت ساعتگرد و پاد ساعتگرد برای ما مهم است.
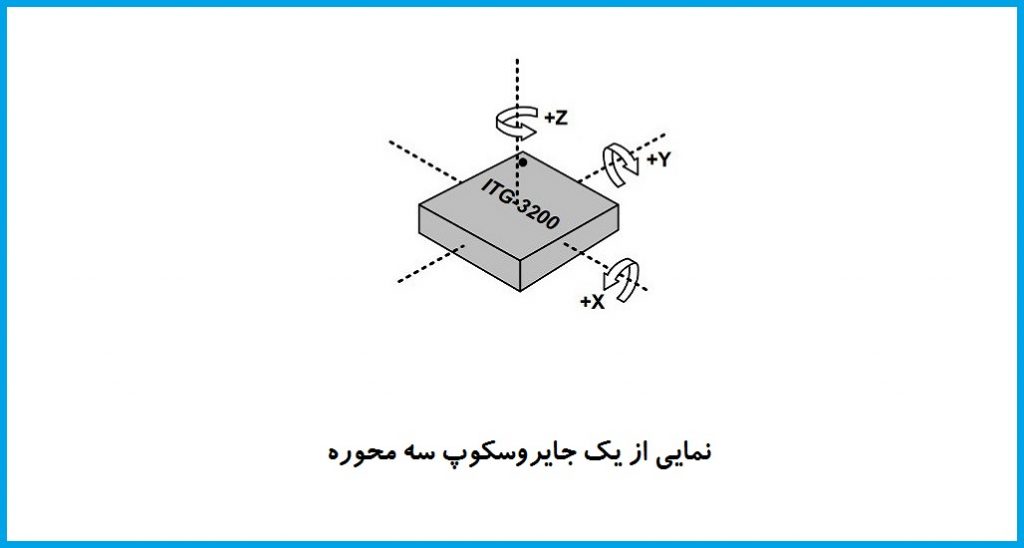
سنسور جایرو نشان داده شده در شکل بالا می تواند در سه جهت سرعت زاویه ای را اندازه بگیرد. بعضی از سنسورها سرعت زاویه ای را فقط در یک جهت اندازه می گیرند و بعضی دیگر سرعت زاویه ای را در دوجهت اندازه می گیرند که بر حسب نیاز خودتان می توانید تک محوره، دو محوره و سه محوره بودن آن را مشخص کنید.
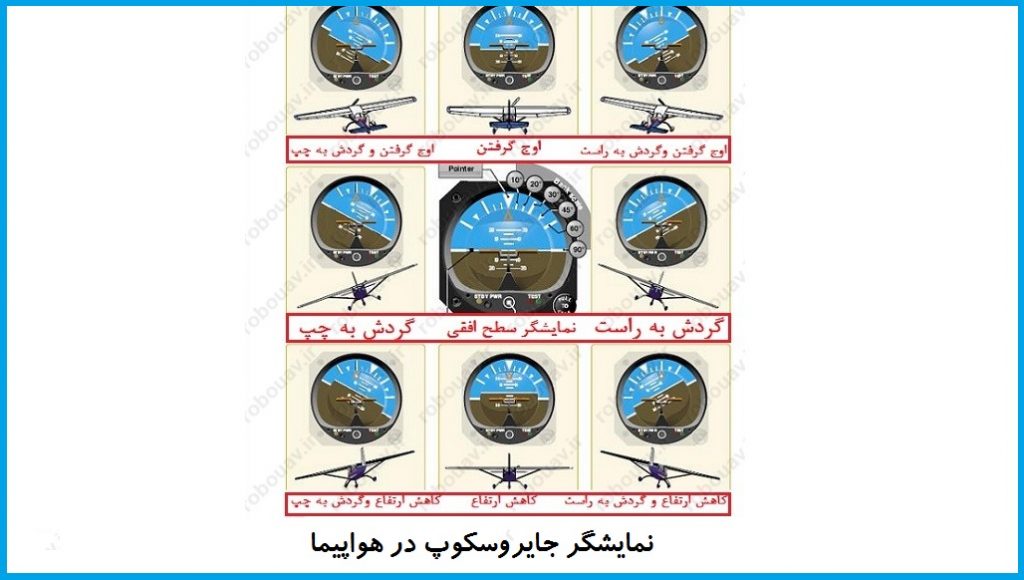
شکل زیر نمونه ای از یک جایرو را نشان می دهد که در هواپیما ها استفاده می شده است. صفحه مندرج میزان چرخش به چپ و راست را نشان می دهد و با استفاده از آن خلبان متوجه میزان مجاز کج شدن را تشخیص می دهد و در صورت نیاز آن را اصلاح می کند. این جایرو رو میتونید با دستتون به چرخش در بیارید و میزان کج شدن آن را بروی صفحه مندرج مشاهده کنید.

كاربرد جايروسكوپ
جایروها در جاهایی استفاده می شوند که سرعت زاویه آن جسم زیاد نباشد و خوشبختانه سفینه های فضایی و هواپیماها فقط چرخش های محدودی با سرعت زاویه کم حول محورهای خود دارند و با استفاده جایرو به راحتی می توان پایداری آنها را تامین کرد.
نکته: شتاب یا سرعت خطی هواپیماها و سفینه ها و… هیچ تاثیری رو مقدار اندازه گیری شده جایرو ندارد.
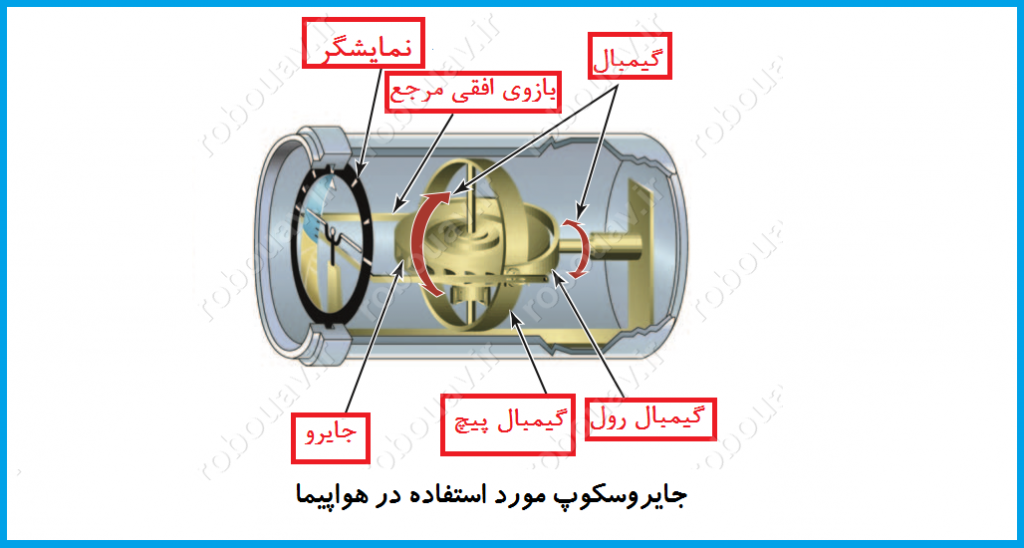
در شکل زیر یک جایرو چرخشی به همراه اجزای آن را مشاهده می کنید.
شکل زیر هم نحوه کار با این جایرو را نشان می دهد:
مفهوم درجه آزادي در جايروسكوپ
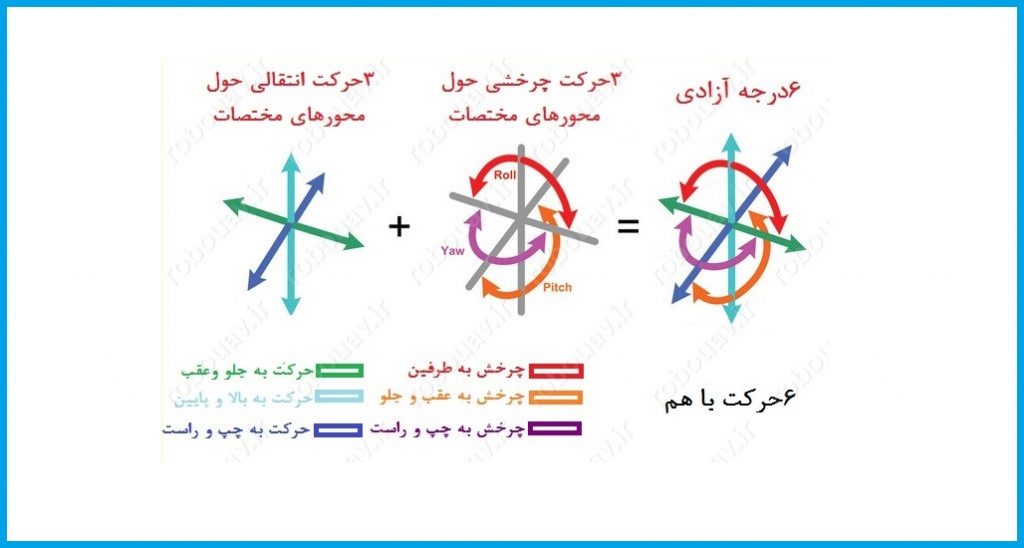
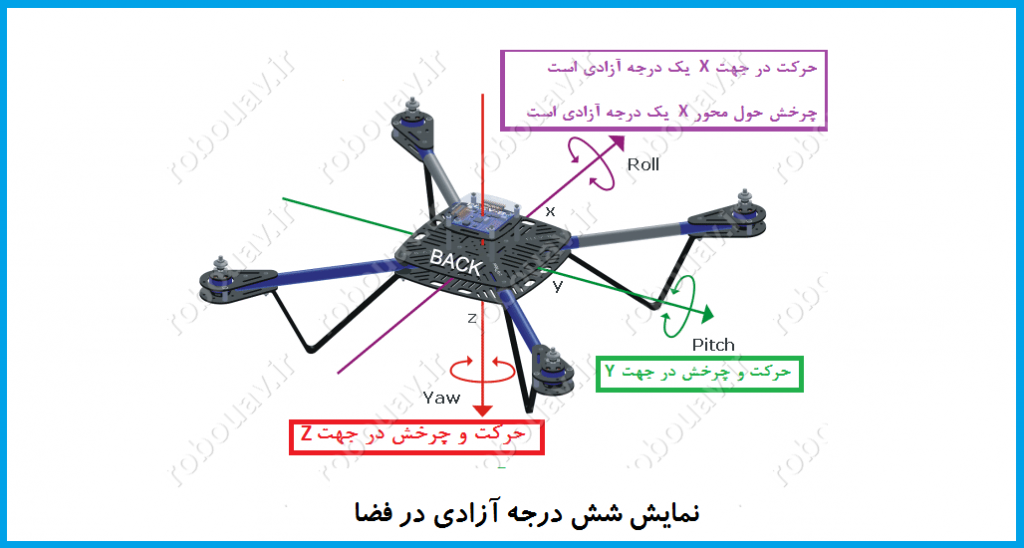
در فضای اطرافمان ما 6 درجه آزادی داریم یعنی یک جسم را میتوان به شش طریق در فضا چرخاند و حرکت داد. سه تا درجه آزادی که مربوط به رول، پیچ و یاو بود که در جلسات قبل توضیح دادیم و سه تا درجه آزادی هم مربوط به حرکت مستقیم در جهت های X و Y و Z است. شکل زیر شش درجه آزادی را به وضوح نشان می دهد.
در شکل زیر درجه آزادی روی کوادروتور نشان داده شده است.
جایرو هم فقط سه درجه آزادی مربوط به چرخش را دارد و براحتی حول خودش می چرخد ولی این چرخش ها و حرکات روی محور وچرخ وسط به هیچ وجه تاثیر نمی گذارد.
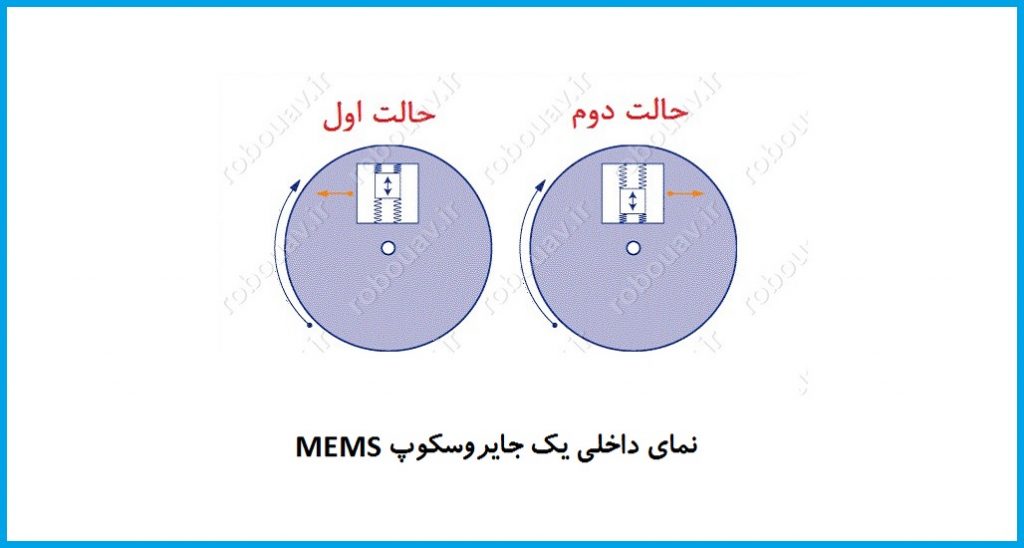
جایروهای MEMS
سنسور جایروسکوپ درون MEMS بسیار کوچک می باشد(بین 1تا100 میکرومتر یعنی اندازه قطر موی انسان). هنگامی که جایرو میچرخد یک جسم کوچک نوسان کننده درون آن تغییر موقعیت می دهد و این تغییر موقعیت تبدیل به یک سیگنال الکتریکی بسیار کوچک می شود که بعد از آن تقویت می شود و به میکروکنترلر فرستاده می شود.
معيارهاي انتخاب جايروسكوپ
معیارهای زیادی برای انتخاب یک جایرو وجود دارد و در اینجا ما مهمترین آنها را مورد بحث قرار می دهیم.
محدوده اندازه گيري جايروسكوپ
محدوده اندازه گیری جایرو، بیشترین سرعت زاویه ای است که یک جایروسکوپ می تواند اندازه بگیرد. هنگام انتخاب جایروسکوپ با توجه به نیاز خودتان میزان سرعت زاویه ای که نیاز دارید را از دیتاشیت جایرو مطالعه کنید و پس از آن اقدام به خرید کنید.
حساسيت جايروسكوپ
حساسیت جایرو بر حسب میلی ولت بر درجه بر ثانیه (mV/°/s) اندازه گیری می شود. در حقیقت این حساسیت بدین صورت است که برای یک سرعت زاویه ای مشخص میزان تغییر ولتاژ چقدر است. برای مثال اگر حساسیت یک جایرو 30mV/°/s باشد و خروجی شما 300mV باشد میزان چرخش شما 10 درجه است.
نکته مهم: هر چه حساسیت جایروسکوپ افزایش یابد محدوده اندازه گیری جایروسکوپ کاهش می یابد.
دقت کنید که با محدوده اندازه گیری بیشتر دقت و رزولوشن جایرو کاهش می یابد.
باياس كردن جايروسكوپ
همانند تمامی سنسورها جایرو هم مقداری خطا از خود نشان می دهد. شما می توانید یک جایرو را هنگامی که ساکن است با استفاده از مقادیر خروجی آن بایاس کنید. شاید تصور کنید که چون جایرو ساکن است پس مقادیر خروجی از آن هم باید صفر باشد ولی جایرو تعدادی از مقادیر را به صورت غیر صفر نشان می دهد که این خطاها به خطای دریفت یا خطای ناپایداری شناخته می شود. دمای سنسور به میزان زیادی روی مقادیر آن تاثیر می گذارد و برای کمک به کاهش این نوع خطا، خود سنسور دارای یک سنسور دمای درونی است. بنابراین شما باید دمای سنسور را بخوانید و هر تغییرات وابسته به دمایی را با استفاده از کدنویسی تصحیح کنید. به منظور کالیبره کردن این خطاها، جایرو را در حالت سکون نگه دارید و تمامی مقادیر مربوط به آن را با کدنویسی صفر کنید.
این جلسه هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.63k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
30.98k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.86k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.42k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2.07k بازدید
20 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
ولی کنترلشو دستکاری کردم فکر کنم قدرت موتور کم و زیاد کردم این صفحه اطلاعات پروازشه
سلام مجدد
مشكلى بابت كنترل به وجود نمى آيد فقط نام تجارى كوادكوپتر كه بر روى آن حك شده است را به طور كامل ارسال كنيد. در عكس ها چيزى از نام پرنده موجود نيست.
با سپاس
مدلش idrone i8h
با سلام و احترام
لطفا بدنه پرنده را باز كنيد و تمامى اتصالات و سيم ها را بررسى نمائيد ببينيد تمامى موتورها متصل باشند و قطع اتصال نباشند. در مرحله بعد اسپيدكنترلرها را بررسى كنيد ببينيد در چه وضعيتى هستند و اگر خراب هستند جايگزين گردند. البته من از قطعات داخلى كوادكوپتر شما اطلاعى ندارم زيرا كوادكوپتر شما تجارى است و ممكن است اسپيدكنترل بر روى برد اصلى همراه با فلايت كنترل باشدبنابراين خودتان مرحله به مرحله اين ها را انجام دهيد.
موفق باشيد
من یه پهباد گرفتم مودلش idrone امروز صبح چند تا ضربه خورد بهش و بعد از ظهر اومدم باهاش کار کنم روشنش کردم یه ضره آوردمش بالا دستگاه به سمت چپ رفت و خورد زمین شما میدونید مشکلش چیه من از یکی پرسیدم گفت جارو خازن دستگاه خراب شده اگه میدونید لطفا بگبد مشکلش چیه و قیمت اون وسیله ای که خراب شده هم بگید.
ضمن سلام و عرض ادب
لطفا برند كوادكوپتر خود را به صورت دقيق ذكر نمائيد. در صورت امكان عكسى از نماى بالا ارسال كنيد.
با آرزوى موفقيت براى شما
خیلی ممنون از وبسایتتون
فقط یه سوال این خطای دریفت با استفاده از داده های ژیرسکوپ چگونه میشه حذفش کرد ؟
سلام جناب زارعی
نحوه کاهش خطای دریفت رو در یک جلسه مجزا مربوط به فیلترهای کالمن و… شرح می دهیم.
موفق باشید