موتور براشلس مناسب کوادکوپتر{جلسه پنجم}
مقدمه اى بر موتور براشلس
در این جلسه با ساختار کلی یک موتور براشلس و نمونه ای از این موتور آشنا می شویم. براى دسترسى به بخش دوم موتور براشلس مى توانيد از لينك زير استفاده كنيد:

کاربران محترم، خواندن جلسه موتور براشلس بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
موتور براشلس کلیاتش همانند موتورهای DC معمولیه ولی دیگه براش نداریم. در موتور های دی سی معمولی به دلیل داشتن جاروبک نمیتوان جریان زیادی به جاروبک ها اعمال کرد.چون باعث سوختن براش ها می شود. ولی این محدودیت در موتورهای براشلس نیست. نكته مهم ديگر نيز اين است كه در موتورهاى براشلس به دليل اينكه جاروبك حذف شده است بازده موتور بالاتر است و اصطكاك ناشى از جاروبك حذف شده است به همين دليل زمان كار با يك باترى در شرايط يكسان نيز افزايش مى يابد. در شکل زیر یک موتور بدون جاروبک را می بینید.
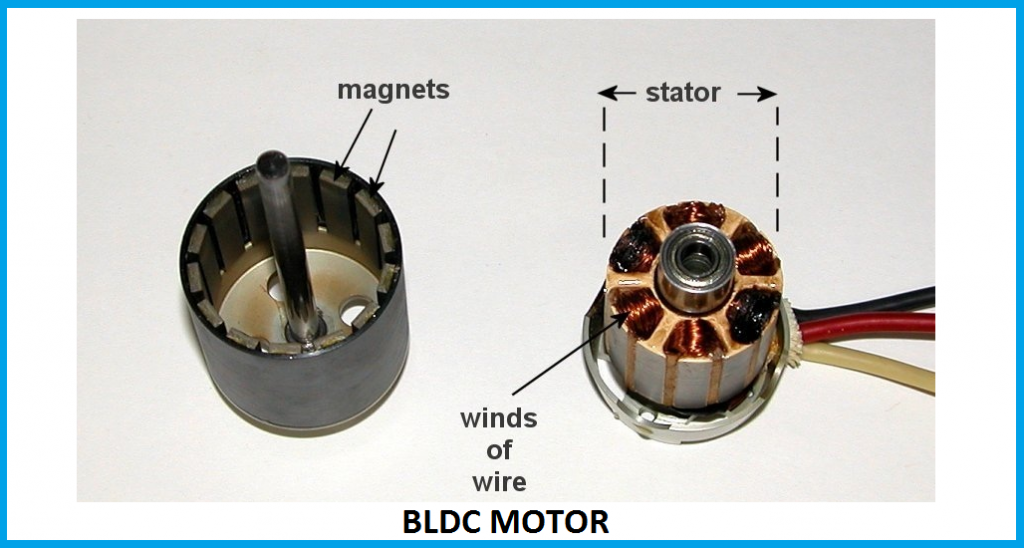
قطعات داخلي موتور براشلس
سه تا سیم به این موتور براشلس متصل شده که وظیفه جریان دهی به استاتور را به عهده دارند و به اسپیدکنترل وصل می شوند.
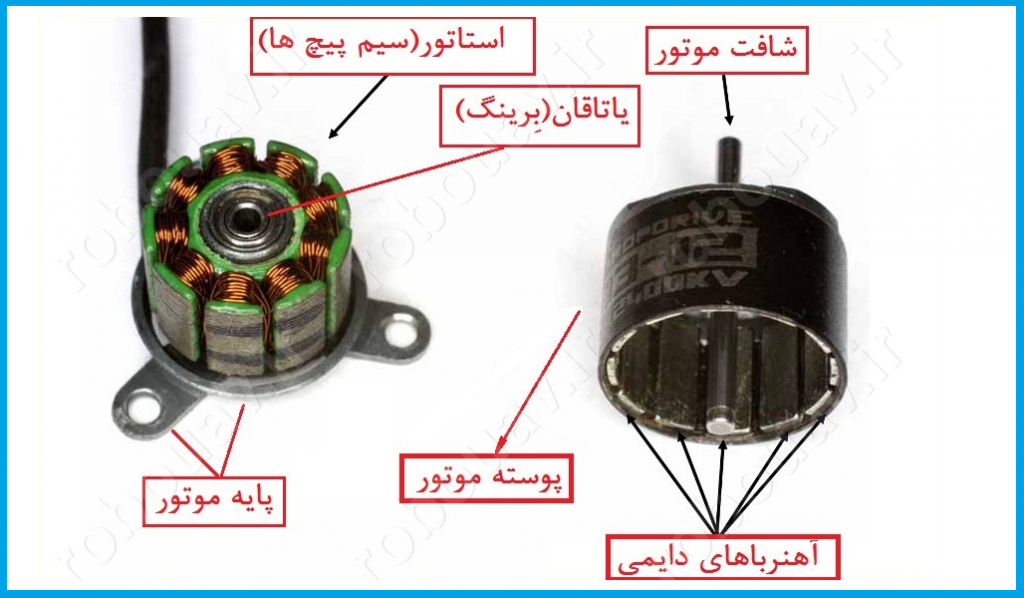
دقت کنید که سیم های استفاده شده در سیم پیچ های استاتور موتور براشلس معمولا تا 180 درجه سیلسیوس یا 356 درجه فارنهایت توانایی تحمل گرما دارند. همچنین تمامی بِرینگ های نصب شده بر روی موتورهای براشلس دارای کاسه نمد می باشند.

نحوه چرخش موتور براشلس OUTRUNNER را در شکل زیر ملاحظه می کنید. میبینید که هیچ اثری از جاروبک نیست.
عبارات درج شده روي موتور براشلس
MT2204
یعنی اینکه قطر موتور 22 میلی متر است و ارتفاع آن 04 میلی متر است. دقت كنيد كه اين اعداد ممكن است مربوط به قطر و ارتفاع روكش موتور نباشد و ابعاد روتور داخلى باشد كه از يك شركت به شركت ديگر متفاوت است و استانداردى وجود ندارد و اگر كنجكاو هستيد مى توانيد با يك متر آن را اندازه گيرى كنيد ولى بحرحال عدد اول قطر و عدد دوم ارتفاع مى باشد.

13T: Turns of the motor
یعنی اینکه تعداد دفعاتی که یک سیم مسی به دور هر دندانه استاتور پیچیده شده است 13 بار است. هر چه تعداد دورها بيشتر باشد آهنرباى قويترى نيز ايجاد مى شود و گشتاور بالاتر مى رود.
Kv = 2300
به این عدد ثابت ولتاژ می گویند. این عدد بیانگر تعداد چرخش موتور در يك دقيقه است هنگامي كه ولتاژ 1 ولت به آن اعمال مي شود. هرچقدر Kv یک موتور بالاتر باشد با سرعت بیشتری می چرخد وبرعکس.
موتورهاي با Kv پايين:
به طور خلاصه موتورهاي با Kv پايين داراي سيم هاي پيچيده شده بيشتري به دور هسته فلزي هستند كه اين سيم ها نازك تر هستند بنابراين مي توانند ولتاژ بيشتري در برابر جريان كمتر از خود عبور دهند كه باعث توليد گشتاور بيشتر مي شود و مي تواند ملخ هاي بزرگتر را به حركت در آورد.
موتورهاي با Kv بالا:
موتورهاي با Kv پايين داراي سيم هاي پيچيده شده كمتري به دور هسته فلزي هستند كه اين سيم ها ضخيم تر هستند بنابراين مي توانند جريان بيشتري در برابر ولتاژ كمتر از خود عبور دهند كه باعث مي شود بتوانند ملخ هاي كوچكتر را با سرعت بالاتري به حركت در آورند.
نحوه محاسبه دور موتور از روی Kv به صورت زیر است:
rpm = Kv*V
مثلا برای موتور نشان داده شده در شکل حداکثر دوری که در 1دقیقه با استفاده از یک باتری 11.1 ولتی میزنه به صورت زیر است:
rpm = 2300*11.1=25530
می بینید که این موتور 25530 دور در یک دقیقه میزنه.
وقتی برای خرید یک موتور براشلس مراجعه می کنیم دقت می کنیم که تراست(thrust) مناسب داشته باشد. مثلا می گوییم من موتوری با تراست 500 گرم میخام این بدین معنیه که موتور براشلس شما حداکثر میتونه 500 گرم وزنه رو از روی زمین بلند کنه. حالا کوادروتور شما 4تا موتور داره پس حداکثر 2000 گرم یا 2کیلوگرم را مي تواند از زمين بلند كند.
در هنگام خرید موتور شافت موتور را چک کنید که از لحاظ لقی شرایط مناسبی را داشته باشد.
نكته مهم: براي اتصال موتورهاي براشلس فاصله پيچ تا پيچ در زير موتور بر طبق استاندارد است و در موتورهای معمول 16 و 19 مي باشد. به شكل زير دقت كنيد. البته در بعضي موتورها دو سوراخ ديگر هم اضافه مي شود كه داراي فاصله 25mm مي باشد و در امتداد سوراخ 19mm است. این ابعاد برای مینی کوادکوپترها تغییر می کنند.

تعدادی از موتورهای براشلس و اسپید کنترلرها نیاز به اتصال با گلدکانکتور دارند که باید به سیم های متصل به موتور و اسپیدکنترلر و یا حتی باتری لحیم شوند. این گلدکانکتورها را باید با روش خاصی که در زیر نشان داده می شود لحیم کرد. دقت کنید که مرحله به مرحله جلو روید تا اتصال خوبی برقرار شود. دقت کنید فقط گلدکانکتورهای مادگی به طور کامل توسط وارنیش پوشیده می شوند که در شکل زیر نشان داده شده است.

سپس مطابق شکل زیر یک تخته یا مقوا را سوراخ کنید و گلدکانکتورها را درون آن قرار دهید.

مرحله به مرحله مطابق شکل زیر لحیم کنید.
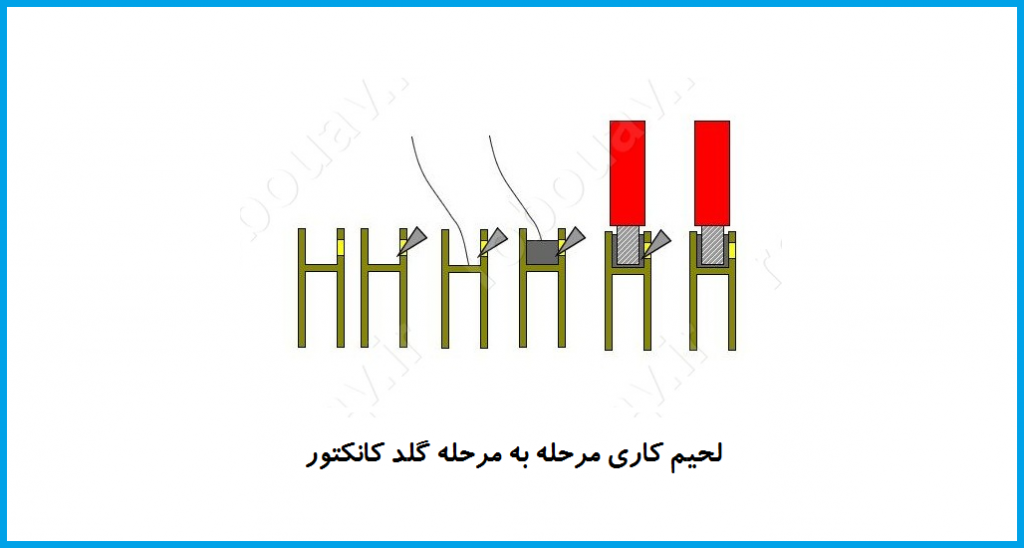
سیم مورد نظر به شکل صحیح لحیم می شود.

1-مگر تراست نیرو نیست پس چرا واحد آن بر حسب گرم بيان مى شود؟؟ در رابطه با واحدهای ذکر شده به طور کلی واحد نیرو، نیوتن است و واحدجرم، گرم است(البته تبدیلاتی هم دارن مثل کیلوگرم برای جرم و کیلونیوتن برای نیرو و دیگر سیستمهای آحاد). در اینجاکه بانیرویی مثل تراست کارمی کنیم برای فهم بهتر مساله از واحد گرم استفاده می کنیم تافهم بهتر مساله حاصل شود و این تبدیل نیوتن بر شتاب جاذبه(9.81متربرمجذورثانیه)در محاسبات K لحاظ شده است. مثلا اگربه ما بگویند 101.9گرم قابل لمس تر است تا 1 نیوتن. F/9.81=M
چنانچه تراست موتوری 80 گرم باشد می توانیم با استفاده از 4موتور نصب شده بر روی ربات در مجموع 320 گرم بلند کنیم که این 320 گرم وزن خود کوادکوپتر هم شامل می شود.
دوستان عزیز برای خرید موتور براشلس و دیگر قطعات ربات های پرنده می توانید از سه وب سایت زیر استفاده کنید. این لینک ها صرفا جهت کمک به کاربران عزیز می باشد و در صورتی که شما هم تجربه خرید از وب سایت معتبر دیگری دارید می توانید در کامنت ها ارسال نمایید.
برای دریافت آخرین مطالب سایت و همچنین مطالب منحصر به فرد دیگر که در سایت منتشر نمی شوند میتوانید در کانال تلگرام ما عضو شوید و یا در اینستاگرام ما را فالوو کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.67k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
31.48k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.9k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.45k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2.13k بازدید
60 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
با سلام.
اتصال سیم پیچ های استاتور در موتور EMAX GT 5345-07 مثلث است یا ستاره؟
لطفا، اگر مرجعی برای مشخصات الکتریکی موتورهای EMAX می شناسید معرفی کنید.
با تشکر
سلام
در مورد اتصال سیم پیچ های موتورهای براشلس در صورتی که به دیتاشیت آنها دسترسی دارید می توانید از دیتاشیت آنها استفاده کنید. در مورد سیم پیچی های موتورهای براشلس که به دو صورت ستاره و مثلث وجود دارد می توانید با توجه به شکل سیم پیچ ها نوع آن را تشخیص دهید. به طور کلی موتورهای با اتصال ستاره بازده بالاتری نسبت به موتورهای با اتصال مثلث دارند. همچنین Kv موتورها با اتصال ستاره 1.73 کمتر از همان نوع موتور با اتصال مثلث است ولی گشتاور اتصال ستاره 1.73 بیشتر از اتصال مثلث است. مثلا اگر موتوری با اتصال ستاره دارای Kv=1000 باشد همین موتور با اتصال مثلث دارای Kv=1000*1.73 که معادل 1730 است می باشد. در اتصال ستاره سه تا سیم مثبت در یک نقطه به هم متصل شده اند و سه تا سیم منفی به سمت اتصال با اسپیدکنترل می روند. در اتصال مثلث سیم مثبت از هر مجموعه سیم ها به سیم منفی از مجموعه بعدی متصل می شود و هرکدام از این مثبت و منفی ها یک فاز را تشکیل می دهند که در مجموع سه فاز می شود. برای مطالعه اطلاعات مربوط به موتورهای براشلس EMAX کافی است اطلاعات مربوط به موتورهای براشلس در حالت کلی را بخوانید زیرا در همه موارد یکسان عمل می کنند.
با سلام وخسته نباشید
۴ عدد موتور براشلس خریداری کردم روی کواد گذاشتم در هنگام کالبیره کردن ۲ تا از موتورا با دور ۱۰۰ % تراتل دود بلند میشه .
موتور air gear 200
بطری ۱۱.۱ ولت
اسمید هم ۱۵ امپر
با سلام
دود کردن موتور به دلایل مختلفی می تواند اتفاق بیفتد. اول اینکه اتصالات مربوط به موتور را به طور کامل چک کنید مثلا جایی که سه تا سیم به موتور متصل می شود برخوردی از لحاظ لخت بودن با هم نداشته باشند. دوم اینکه ابعاد ملخ مورد استفاده بسیار مهم است و ممکن است بیشتر از حد استاندارد باشد و باعث افزایش جریانی بیشتر از توان موتور شود. ابعاد ملخ و مشخصات موتور را بفرستید تا پاسخ کامل داده شود. شایان ذکر است که در صورتی که ابعاد مورد نظر و محاسباتتان درست باشد مشکل از کیفیت موتور هاست مثلا کیفیت سیم های لاکی درون موتور مناسب نیست و درصد مس درون آلیاژ سیم های لاکی کم است و یا اینکه تعداد دور سیم ها کافی نیست و موتور داغ می کند و دود بلند می شود. کیفیت هسته آهنی درون موتور و میزان سیلیس آن هم تاثیر گذار است که درصد کمتری نسبت به بقیه دارد.
موفق باشید
با سلام و احترام:
معرفی کامل براش و براشلس
حتما تا حدودي راجع به موتورهاي براشلس چيزهائي شنيده ايد و يا شايد هم تا بحال از آنها استفاده كرده باشيد. ولي ممكن است كه چيز زيادي راجع به آنها و طرز كارشان ندانيد. حتما مكررا شنيده ايد كه موتورهاي براشلس بسيار بهتر از موتورهاي معمولي هستند ولي شايد ندانيد كه چه برتري ممكن است در اين موتورها باشد. شايد متعجب باشيد كه چرا نميتوانيد از همان كنترلر سرعت موتور معمولي تان بر روي موتور براشلس استفاده كنيد. و يا شايد اين سوال برايتان مطرح باشد كه چرا موتورهاي براشلس بجاي دو سيم سه تا دارند؟ فرق بين يك موتور Inrunner با يك موتور Outrunner در چيست؟ كداميك براي مدل من مناسب تر است
موتورهاي برس دار(معمولي) در مقايسه با موتورهاي بدون برس (براشلس(
موتورهاي معمولي عموما از اجزاي زير تشكيل ميشوند:قسمت متحرك يا آرميچر: كه از يك سيم پيچ تشكيل شده است كه بر روي يك محور فولادي ميچرخد و در انتهاي آن يك قسمت براي اتصال برسها قرار دارد كه برق از طريق برسها به اين قسمت رسيده و وارد سيم پيچها ميشود. قسمت ثابت : كه از دو آهنرباي دائمي با قطبيت مخالف تشكيل شده است برسها: كه با اتصال بصورت تماسي با انتهاي آرميچر، برق را به آن منتقل ميكنند.براي راه اندازي اين موتورها، كافيست كه برق را به برسها وصل كنيم. برق از طريق تماس برس با آرميچر وارد سيم پيچ آن ميشود. سيم پيچها داراي چند قطب هستند و برسها طوري با آرميچر تماس پيدا ميكنند كه در هر لحظه برق وارد يكي از قطبهاي سيم پيچ شده و يك آهنرياي الكتريكي موقتي ايجاد ميكند. اين آهنربا توسط يكي از آهنرباهاي دائمي جذب شده و توسط ديگري دفع ميشود. در اين لعظه قطبيت سيم پيچ عوض شده و يك قطب ديگر مقابل آهنرباها قرار ميگيرد و اين كار باعث چرخش آرميچر بطور دائم تا زماني كه جريان برق برقرار است ميگردد.
معايب اين موتورها عبارتند از:
برسها و محل تماس آنها به مرور زمان سائيده ميشوند. * برسها و محل تماس آنها بايد هر از چند گاهي تميز شوند. * اصطكاك برسها باعث كند كردن چرخش موتور ميشود. * اصطكاك برسها باعث اتلاف انرژي و كمتر شدن زمان پرواز ميشوند. * اصطكاك برسها باعث كمتر شدن نسبت توان به وزن ميشود.
موتورهاي براشلس چگونه كار ميكنند؟
موتورهاي براشلس هم با همان اصل مورد استفاده در موتورهاي معمولي كار ميكنند، با اين تفاوت كه در اين موتورها، سيم پيچ ثابت بوده و آهنرباها ميچرخند. ز آنجائي كه سيم پيچ در اين موتورها ساكن است، نيازي به برسها وجود ندارد. كار تقسيم ولتاژ بين سيم پيچها را كنترل كننده سرعت موتور يا ESC انجام ميدهد. به اين نكته دقت كنيد كه نميتوان از كنترلر سرعت موتورهاي معمولي و موتورهاي براشلس بجاي يكديگر استفاده نمود زيرا اين دو، كار كاملا متفاوتي انجام ميدهند.سريعترين راه براي تشخيص اينكه يك موتور براشلس است يا معمولي اين است كه به سيمهاي آن نگاه كنيد. موتورهاي معمولي دو تا سيم دارند در حالي كه موتورهاي براشلس داراي سه سيم هستند. سيم وسط فيدبك نام دارد و تغيير جاي دو سيم ديگر باعت خواهد شد كه جهت چرخش موتور برعكس شود.
مزاياي موتورهاي براشلس::* از آنجائي كه برس وجود ندارد، خوردگي آن هم در اين موتورها وجود ندارد.* نيازي به نگراني براي تميز كردن برسها و محل اتصالشان وجود ندارد. * اصطكاك برس براي گرفتن سرعت موتور وجود ندارد. * باز هم به همين علت، مدت زمان كاركرد موتور با يك باتري در اين موتورها بالاتر است. * نسبت توان به وزن بسيار بالاتري دارند.
Inrunner در مقايسه با Outrunner
دو نوع موتور براشلس براي مدل هاي راديو كنترل وجود دارد. در نوع Inrunner ، آهنرباهاي دائمي در قسمت داخلي سيم پيچها قرار داده شده اند. اين موتورها ساختماني بسيار شبيه به موتورهاي معمولي دارند با اين تفاوت كه جاي آنرباي دائمي و سيم پيچها عوض شده است. در نوع Outrunner ، آهنرباهاي دائمي در قسمت بيروني قرار گرفته اند. همانطور كه در عكس ميتوانيد ببينيد، كاسه بيروني موتور كه محور موتور به آن متصل است، آهنرباهاي دائمي را بر روي خود نصب دارد.هرچه يك موتور سريعتر بچرخد، راندمان آن هم بالاتر است. موتورهاي Inrunner بسيار سريع ميچرخند و راندمان بسيار بالاتري نسبت به موتورهاي Outrunner دارند. موتورهاي Inrunner نياز به استفاده از گيربكس مابين موتور و ملخ دارند تا دور آنها را كاهش داده و قدرت را افزايش بدهد. از اين رو با استفاده از گيربكسهاي مختلف بر روي اين موتورها ميتوان به قدرت و سرعت دلخواه براي نيازهاي مختلف و مدلهاي مختلف رسيد.نكته منفي در مورد موتورهاي Inrunner اين است كه افزودن قطعات اضافي (گيربكس) ميتواند احتمال خرابي و از كار افتادن موتور را افزايش دهد. مثلا چرخ دنده هاي گيربكس به مرور سائيده ميشوند و محور گيربكس ممكن است كه تاب بردارد. همچنين جا دادن يك موتور به همراه گيربكس بر روي دماغه هواپيما هنگام نصب موتور ، ممكن است كه راحت نباشد.موتورهاي Outrunner بسيار كندتر از موتورهاي Inrunner ميچرخند و گشتاور بسيار بيشتري هم ايجاد ميكنند. بزرگترين حسن اين موتورها اين است كه در واقع نيازي به گيربكس ندارند. اين موضوع باعث ميشود كه هواپيما سر و صداي بسيار كمتري ايجاد كند و تقريبا بي صدا باشد. از طرفي، موتورهاي Outrunner را بسيار راحت تر ميتوان نصب نمود.نكته منفي در مورد اين موتورها اين است كه دست شما در انتخاب ملخهاي مختلف براي هواپيمايتان باز نيست. شما مجبوريد موتور مناسب براي هواپيمايتان را انتخاب كنيد اما همانطور كه در بالا گفتيم، در مورد موتورهاي Inrunner ، شما با تغيير اندازه چرخ دنده هاي گيربكس ميتوانيد يك موتور را براي اندازه هاي مختلف ملخ بكار ببريد.همچنين، راندمان موتورهاي Outrunner در مقايسه با Inrunner پائينتر است. اما اين مسئله يك مشكل بزرگ براي شما نخواهد بود.
مقايسه اين دو نوع موتور:
Inrunner * دور بالا ، گشتاور پائين * راندمان بالاتر * نياز به گيربكس دارند * قابليت استفاده از انواع ملخ * سر و صداي زياد * Outrunner: دور پائين ، گشتاور بالا * راندمان پائينتر* عدم نياز به گيربكس* محدوديت در انتخاب ملخ * تقريبا بي صدا
آشنائي با مشخصات اين موتورها
اكثر هواپيما ها و هليكوپترهاي راديو كنترل يا با موتور مناسب عرضه ميشوند و يا در دفترچه آنها، نوع موتور مناسب براي آنها ذكر ميشود. اگر شما ميخواهيد موتور هواپيمايتان را از نوع الكتريكي معمولي يا سوختي به الكتريكي براشلس تغيير دهيد، درك اصطلاحات و مشخصات اين موتورها ميتواند بسيار مهم باشد.
ثابت ولتاژ
ثابت ولتاژ يا Kv عبارت است از تعداد دوري كه موتور به ازاي هر ولت ميزند. از آنجائي كه هيچ موتوري با راندمان 100 درصد نيست، معمولا مقدار واقعي كمي كمتر از اين خواهد بود.بعنوان مثال اگر شما ولتاژ 10 ولت به يك موتور با Kv برابر با 1200 وارد نمائيد، اين موتور با دور 1200*10=12000 دور در دقيقه خواهد چرخيد.
ثابت گشتاور:ثابت گشتاور را Kt مينامند. براي همه موتورها، Kt=1355/Kv . با اين وصف، هر چه دور يك موتور در يك ولتاژ مشخص بالاتر باشد، گشتاور آن پائينتر خواهد بود.بطور كلي، موتورهاي Outrunner داراي Kv پائينتر هستند كه باعث ايجاد گشتاور بالاتر و توانائي چرخاندن ملخهاي بزرگتر در آنها ميشود. عكس اين موضوع هم در مورد موتورهاي Inrunner صادق است.
جريان بدون بار:جريان بدون بار يا Io به مقدار جرياني ميگويند كه موتور بدون بستن ملخ بر روي آن مصرف ميكند. بعنوان مثال، اگر موتور شما 25 آمپر جريان ميكشد و جريان بدون بار آن 2 آمپر است، در اينصورت شما در واقع 23 آمپر صرف چرخاندن ملخ ميكنيد.
مقاومت ترمينال:مقاومت ترمينال يا Rm عبارت است از مقاومت داخلي موتور كه با اهم سنجيده ميشود. هرچه مقدار اين مقاومت بالاتر باشد، راندمان موتور پائينتر است.
جريان و توان:حداكثر جريان و توان ، چيزي است كه مشخص ميكند چه اندازه ملخ و چه سايز هواپيمائي را ميتوان با اين موتور بكار برد. براي بدست آوردن توان كافيست كه جريان را در ولتاژ باتري ضرب كنيد.هرچه اندازه و گام ملخ بزرگتر باشد، جرياني كه موتور در يك دور مشخص ميكشد بيشتر خواهد بود. مثلا موتور 1200KV مورد اشاره، با ولتاژ 10 ولت اعمال شده، 12000 دور بر دقيقه خواهد چرخيد، چه ملخ 10×6 بر روي آن بسته باشيد و چه 11×5 . اما ملخ 11×5 باعث خواهد شد كه موتور جريان بيشتري بكشد. اگر موتور بيش از حد جريان بكشد، آسيب خواهد ديد.
باسلام بنده قصد استفاده از موتور های براشلس یا موتورهای Dc چهار کاناله رو دارم اما نمیدونم نحوه جریان دهی برق ب این موتورها ب چ صورت هست در صورتی که براشلس سه ورودی جریان برق و بعضی موتورهای مناسب برای استفاده در کواد ۴ورودی برق دارن اگر راهنمایی کنید ممنون میشم.باتشکر
سلام
موتورهای براشلس مورد استفاده در کوادروتور کلا 3تاسیم دارن. در صورتی که موتور خاصی مد نظرتون هست لینکش رو برامون ارسال کنید.
موفق باشید