انواع مدل هاى كوادكوپتر {جلسه دوم}
مقدمه اى بر انواع مدل هاى كوادكوپتر
در جلسه دوم دوره كوادروتور قصد داریم در مورد انواع مدل هاى كوادكوپتر و فريم ها بحث كنيم. ساخت كوادروتور از بقيه مولتى روتورها ساده تر است. در طى جلسه ممكن است متناوبا از لغات كوادروتور و كوادكوپتر به جاى يكديگر استفاده شود كه منظورمان همين ربات هاى پرنده چهار موتوره است يا همين پهپادهاى چهار موتوره عمود پرواز است. قبل از شروع به خواندن اين جلسه از لينك زير جلسه قبل را مطالعه نمائيد.
کاربران محترم، خواندن جلسه انواع مدل هاى كوادكوپتر بدون انجام تمرینات آن و گام به گام پیش رفتن با درس كافى نمى باشد. لطفا تمرين هاى آخر جلسه به همراه لينك هاى ارسال شده را به دقت مطالعه كنيد تا به درك كامل و عميقى از مطالبى كه در ادامه مى آيد برسيد.
دقت كنيد كه پهپاد دسته كلى ربات هاى پرنده است و مولتى روتورها و بويژه كوادروتورها زيردسته پهپادها محسوب مى شوند. پس در طى اين جلسه و جلسات آينده به اين تفاوت ها دقت كنيد. کوادروتور به علت داشتن چهار عدد موتور به این اسم شناخته می شود. علت اینکه این پرنده عمود پرواز محبوبیت خاصی دارد این است که کنترل آن بسیار آسان است و قابلیت مانور بالایی دارد.
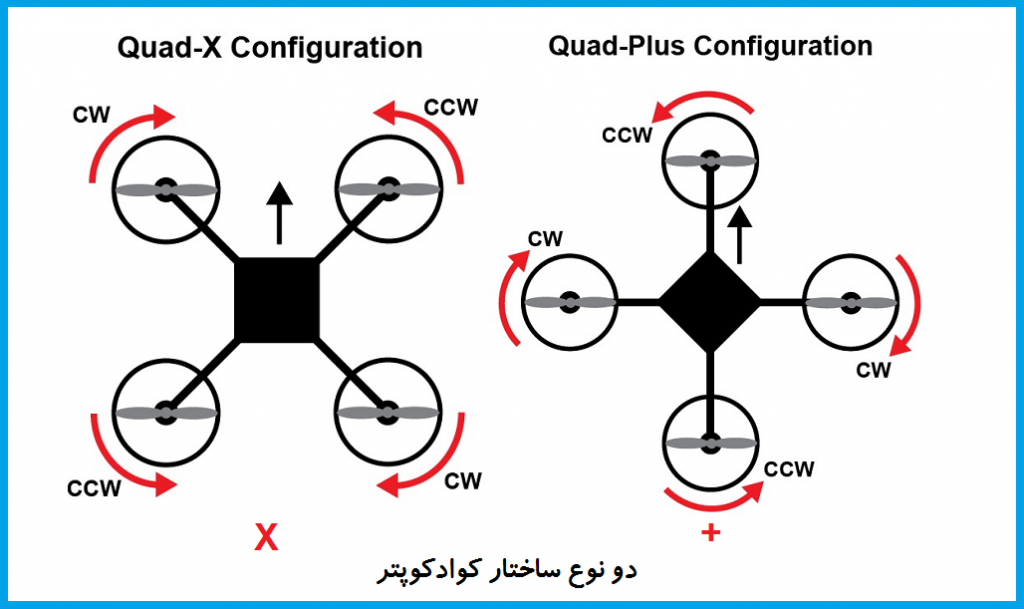
پهپادهاى عمودپرواز را اختصارا با VTOL نشان مى دهند كه معرف Vertical Take off and Landing مى باشد. چرخش چهار موتور نصب شده بر روی ربات به گونه ای است که تعادل كوادكوپتر حفظ شده و ازچرخش آن به دور خود يا چرخش حول محورها جلوگیری شود. یک کوادروتور را می توان به دو شکل + و x ساخت. در شکل زیر دو نوع رايج چینش موتورهاى كوادروتور بر روی فریم مشاهده مى كنيد. اين دو نوع چينش موتورها رايج ترين نوع چينش موتورهاى انواع مدل هاى كوادكوپتر مى باشد كه در همه فلايت كنترلرها پشتيبانى مى شود. از بين اين دو نوع نيز باز نوع X كاربرد بيشترى دارد و رايج تر است.
معمولا براى ساخت كوادروتور از هر نوع طرحی استفاده كنيد مزایا و معایب خاص خودش را دارد که در زیر به آن اشاره می کنیم:
كوادكوپتر نوع X
در ساخت كوادروتور نوع x برای نصب دوربین ها و دیگر تجهیزات جانبی دید بیشتری داريد ولی در عوض جلوی ربات براحتی مشخص نیست و باید با استفاده از رنگ جلوی فریم یا قرار دادن LED جلوی آن را مشخص نمائيد كه البته اين ترفند براى مشخص نمودن جلوى كوادروتور فقط براى مسافت هاى كوتاه است و براى مسافت هاى زياد از ترفندهاى ديگرى استفاده مى شود كه در جلسات آينده با آنها آشنا مى شويد.
كوادكوپتر نوع +
در ساخت كوادروتور نوع + جلوی ربات کاملا مشخص است چون فقط یک موتور در جلوی ربات است. البته باز هم برای دید در شب باید از چهار نوع LED با رنگهای مختلف در اطراف ربات استفاده کرد تا طرفین ربات مشخص باشد. نکته دیگر اینکه در حرکت در مسیر مستقیم در صورت برخورد به مانع در ساختار + در صورتی که حفاظ برای موتور نداشته باشیم فقط یک موتور برخورد می کند و آسیب می بیند. ولی در ساختار نوع x دو موتور برخورد می کند که باز هم با گذاشتن حفاظ و سنسورهاى ديد كوادروتور به راحتی قابل رفع شدن است.
نحوه حركت ملخ هاي كوادكوپتر
شكل زير نحوه حركت ملخ ها در نوع X را نشان مي دهد. همانطور كه در شكل زير مشاهده مى كنيد دو ملخى كه روبروى هم هستند(رنگ آبى) در يك جهت يكسان مى چرخند و دو ملخ ديگر نيز كه با رنگ قرمز مشخص شده اند و روبروى يكديگرند در يك جهت يكسان مى چرخند و اين قضيه در تمام مدل هاى كوادروتور يكسان است. يعنى اينكه هميشه موتورهاى روبروى هم بايد در يك جهت يكسان بچرخند.
نحوه حركت در جهات مختلف
هنگامى كه كوادروتور در آسمان پرواز مى كند قطعا نياز است كه در جهات مختلف نيز حركت كند مثلا اينكه به چپ برود يا به راست برود و جلو و عقب شود كه اين امر با ترفندهاى خاصى قابل اجرا است زيرا در حالت عادى كه موتورها مطابق شكل بالا مى چرخند و دور موتور همه آنها مشابه هم كم و زياد مى شود كوادروتور فقط بالا و پايين مى رود ولى براى حركت در جهت ديگر مى بايست دور موتورها را تغيير دهيم.
در شکل زیر نحوه حرکت كوادكوپتر + و چرخش آن در جهات مختلف با توجه به افزایش دور موتورها نشان داده شده است. در شكل زير بر روى بعضى موتورها فلش هاى بزرگتر وجود دارد كه نشان دهنده اين است كه دور موتور آنها از بقيه موتورها بيشتر است و موتورهايى كه فلش كوچكتر بر روى آنها وجود دارد يعنى اينكه دور موتور آنها كمتر است. به اندازه فلش ها دقت کنید.
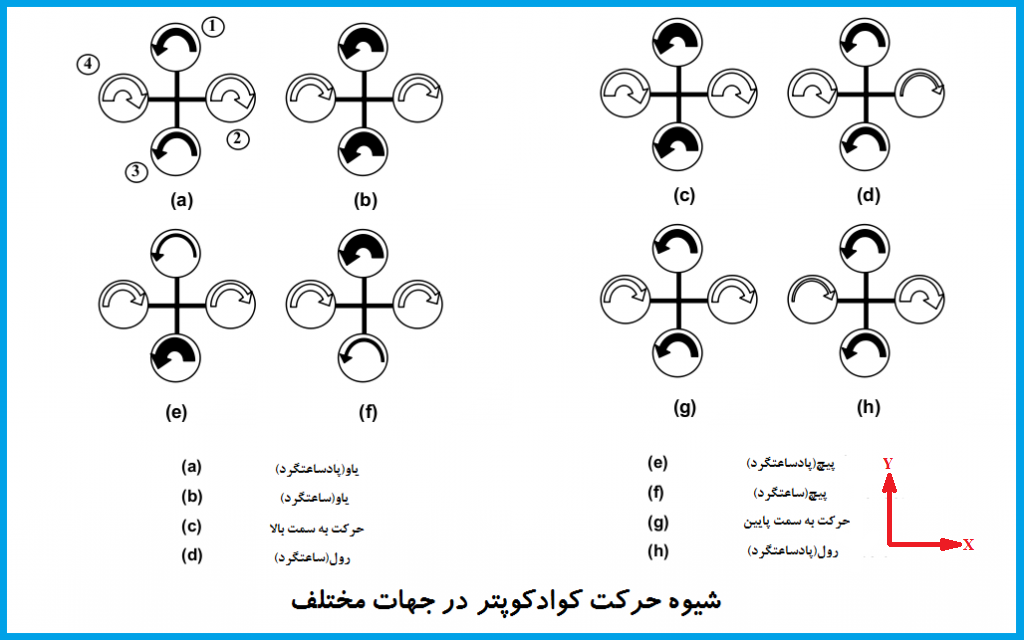
در شکل a می بینیم که دور موتورهای 2 و 4 افزایش یافته و چون جهت چرخش موتورهای 2 و 4 در جهت ساعتگرد است ربات به دور خود در جهت ساعتگرد میچرخد. در حقیقت در این چرخش ربات حول محورعمودی خود که همان محور z می باشد می چرخد که به اين چرخش ربات حول محور Z اصطلاحا یاو می گویيم.
در شکل b می بینیم که دور موتورهای 1 و 3 افزایش یافته و چون جهت چرخش موتورهای 1 و 3 در جهت پاد ساعتگرد است ربات به دور خود در جهت پاد ساعتگرد میچرخد. كه باز هم به آن ياو مى گوييم هر چند در جهت مخالف چرخيده است. هر نوع چرخشى حول محور Z را ياو مى ناميم.
در شكل C دور تمامى موتورها به صورت يكسان افزايش يافته است و باعث مى شود كه ربات به سمت بالا حركت كند. در اين نوع حركت ربات به صورت كاملا مستقيم به سمت بالا حركت مى كند.
در شکل d می بینیم که فقط دور موتور شماره 4 افزایش پیدا کرده است پس ربات به سمت راست کج می شود و به سمت راست حركت مى كند كه البته در جهت محور X حركت مى كند. حركت در جهت محور X را اصطلاحا رول مى ناميم. حركت در جهت محور X معادل اين است كه حول محور Y چرخش داشته باشيم. محورهای مختصات در پایین صفحه نشان داده شده است.
در شکل e می بینیم که فقط دور موتور شماره 3 افزایش پیدا کرده است پس ربات به سمت جلو کج می شود و به سمت جلو حركت مى كند كه البته در جهت محور Y حركت مى كند. حركت در جهت محور Y را اصطلاحا پيچ مى ناميم. حركت در جهت محور Y معادل اين است كه حول محور X چرخش داشته باشيم.
در شکل f دور موتور شماره 1 افزایش می یابد که باعث مى شود ربات به عقب حركت كند و باعث حركت ربات در جهت منفى محور Y مى شود كه به آن پیچ می گویند. در حقيقت حركت در جهت منفى محور Y مشابه اين است كه حول محور X چرخش داريم. از شكل هاى e و f نتيجه مى گيريم كه حركت به جلو و عقب را اصطلاحا پيچ مى گوئيم.
به همين ترتيب بقيه شكل ها نيز تعبير مى شوند.
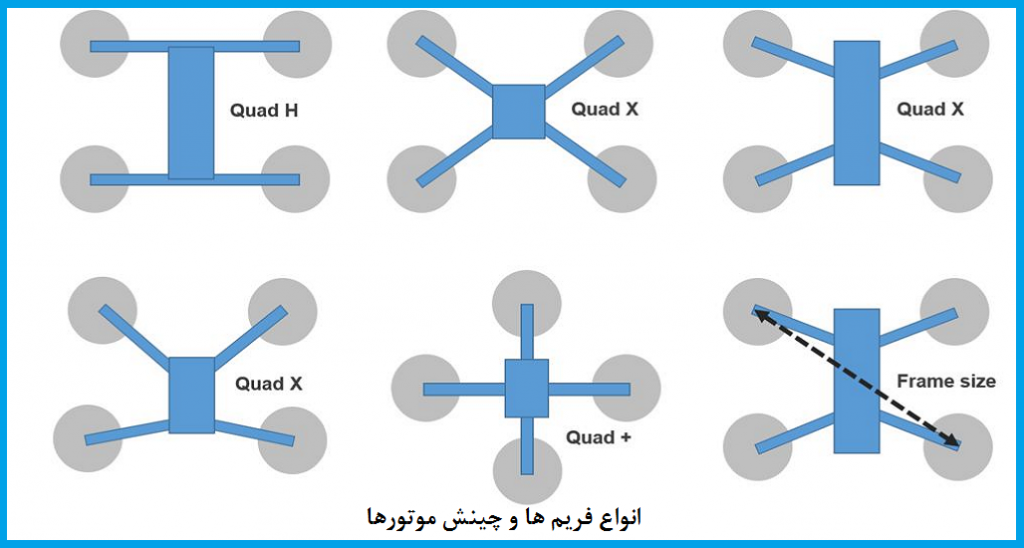
دقت كنيد كه فريم هاى كواكوپتر را به شكل هاى ديگرى نيز مى سازند كه لزوما به معناى تغيير ساختار نيست و از همان چينش موتورهاى قبلى استفاده مى شود.
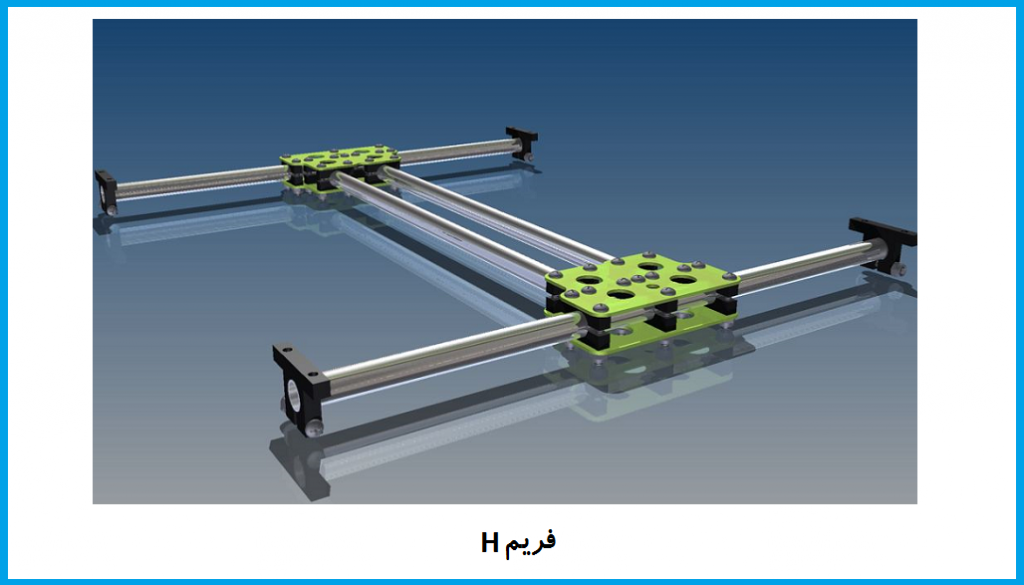
فريم
فريم SPIDER

البته به اين فريم V هم مى گويند.
در شكل زير تنوع ساخت اين بدنه ها نشان داده شده است و همانطور كه مي بينيد فارغ از نوع بدنه هر كدام از آنها يكى از دو نوع ساختار X يا + را داراست.
جلسه انواع مدل هاى كوادكوپتر هم به پایان رسید. برای اطلاع از جلساتی که در آینده بر روی سایت قرار داده می شود و همچنین مطالبی که در کانال ما منتشر می شود می توانید ما را در محیط های مجازی دنبال کنید:
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
1.63k بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
30.99k بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
1.87k بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
1.42k بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
2.08k بازدید