انواع ربات هاى چرخ دار و شيوه هاى كنترلى آنها {جلسه چهارم}
مقدمه
چرخ ها يكى از اجزاى مهم حركتى ربات ها هستند. ربات ها با استفاده از چرخ ها مى توانند گوى سبقت را از انسان ها ربوده و سرعت خود را افزايش دهند. در مقابل چرخ ها، شنى ها قرار دارند. شنى ها نيز سيستم حركتى خاص خود را دارند و به همان اندازه چرخ ها داراى اهميت مى باشند. چرخ ها و شنى ها كنترل آسانترى نسبت به پاها دارند و البته هر كدام نيز مزايا و معايب خاص خود را دارند مثلا اينكه چرخ ها را مى بايست در محيط هاى هموار و يا نسبتا هموار به حركت در آورد ولى پاها را در محيط هاى ناهموار نيز مى توان استفاده كرد. در ادامه با انواع ربات هاى چرخ دار آشنا مى شويم. در هنگام طراحى يك ربات كه در جلسات آتى مطرح مى شود ممكن است نياز باشد كه خودتان چرخ مورد نظرتان را براى رباتتان بسازيد زيرا ممكن است بيشتر چرخ هاى موجود در بازار نيازتان را برطرف نسازند.
سيستم حركتى چرخ دار
در سيستم حركتى چرخ دار شما مى توانيد چرخ ها را به گونه هاى متفاوتى استفاده كنيد:
- ربات هاى داراى يك چرخ
- ربات هاى داراى دو چرخ
- ربات هاى داراى سه چرخ
- ربات هاى داراى چهار چرخ
- ربات هاى با چرخ هاى بيشتر از چهار
ربات هاى داراى يك چرخ
از آنجايى كه كنترل ربات هاى يك چرخ به آسانى نيست و ناپايدار هستند به همين دليل رواج كمترى دارند ولى از لحاظ هزينه و بقيه موارد به صرفه هستند. هنگامى كه از يك چرخ براى حركت يك ربات استفاده مى شود ربات فقط با استفاده از يك نقطه چرخ با زمين در تماس است بنابراين پايدارى آن به سختى صورت مى گيرد. استفاده از چرخ هاى كروى براى يك ربات يك چرخ به نسبت آسانتر از چرخ هاى ديگر است زيرا ربات دسترسى راحترى به همه جهات دارد. در شكل زير ربات يك چرخ موراتا را مشاهده مى كنيد كه توانسته است با استفاده از تنها يك چرخ تعادل مناسبى را رقم بزند.

ربات هاى داراى دو چرخ
ربات هاى دو چرخ داراى دو چرخ مى باشند كه به صورت موازى در طرفين ربات قرار مى گيرند. كنترل ربات هاى دو چرخ شايد در نگاه اول آسانتر از ربات هاى يك چرخ باشد ولى حفظ پايدارى آنها آسان نيست. براى اينكه بتوانيم تعادل را بهتر كنيم قطعا بايد مركز ثقل ربات را در يك نقطه پايين نگه داريم به همين منظور در ربات هاى دو چرخ باترى را در پايين بدنه قرار مى دهند تا مركز ثقل كلى ربات در زير محور مركزى چرخ ها قرار گيرد. همانطور كه در اسكوترهاى برقى مشاهده مى كنيد مركز ثقل آنها پايين مى باشد.
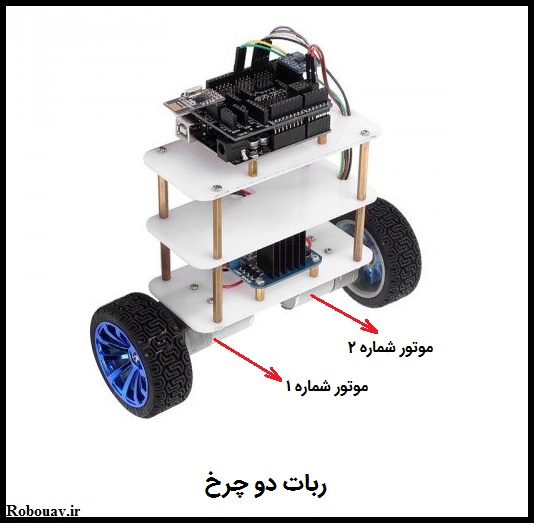
براى چرخش يك ربات دو چرخ همانطور كه مشاهده مى كنيد كافى است دور موتور يكى از موتورها را افزايش دهيم تا در جهت مخالف بچرخد مثلا براى چرخش به سمت راست كافى است كه دور موتور سمت چپ را افزايش دهيم و براى چرخش به سمت راست كافى است كه دور موتور سمت چپ را افزايش دهيم.
ربات هاى داراى سه چرخ
ربات هاى سه چرخ همانطور كه از نامشان پيداست داراى سه چرخ مى باشند و نيز به دو دسته تقسيم مى شوند:
- دسته اول ربات هايى هستند كه از دو چرخ آنها به موتور متصل است و كار انتقال قدرت را انجام مى دهند و چرخ سوم نيز صرفا هرزگرد است و فقط به اين طرف و آن طرف كشيده مى شود تا تعادل ربات را حفظ كند. دور موتور هر كدام از موتورها را افزايش دهيم ربات در جهت مخالف شروع به چرخيدن مى كند.
- دسته دوم ربات هايى هستند كه از هر سه چرخ براى انتقال قدرت بهره مى برند و چرخ هرزگردى وجود ندارد. به شكل زير دقت كنيد. همانطور كه در اين شكل مشاهده مى كنيد به هر چرخ يك موتور متصل شده است و هر سه چرخ قدرت موتورها را منتقل مى كنند. در مورد جهت چرخش و كار با چرخ هاى امنى دايركشنال در جلسات آتى بحث مى شود.

ربات هاى داراى چهار چرخ
ربات هاى چهار چرخ مزاياى زيادى نسبت به بقيه ربات ها دارند كه مهمترين آن پايدارى ربات است. همانگونه كه مشاهده مى كنيد تمامى ماشين ها داراى چهار چرخ هستند و به دليل پايدارى بالاى چهار چرخ ديگر براى تعيين مركز ثقل نيز كمى دستمان بازتر است. از معايب ربات هاى چهار چرخ نسبت به سه چرخ و دو چرخ و يك چرخ اين است كه به دليل افزايش تعداد موتورها و ديگر متعلقات آن هزينه ها افزايش مى يابد كه بار مالى دارد.
در مورد دسته بندى آنها بر اساس كنترل چرخ ها و انتقال قدرت به سه صورت دسته بندى مى شوند:
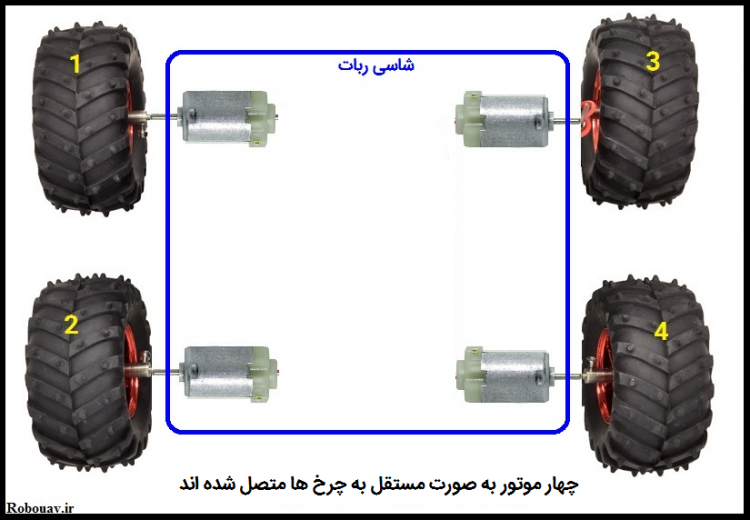
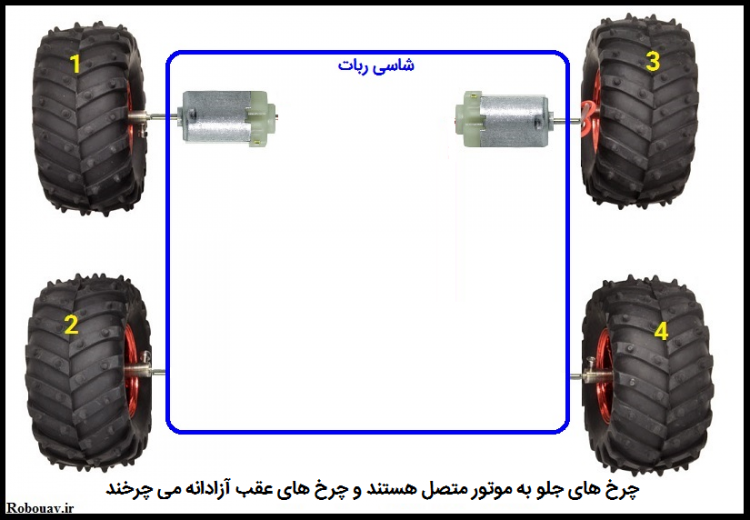
- دسته اول بدين صورت است كه چهار موتور را به چهار چرخ به صورت مستقل متصل مى كنيم. يعنى اينكه براى چرخش به سمت راست مى بايست دور موتورهاى سمت چپ(1و2) را افزايش دهيم و برى چرخش به سمت چپ دور موتورهاى سمت راست(3و4) را افزايش دهيم. در اين روش كنترلى ما از هيچ ديفرانسيلى استفاده نمى كنيم و موتورها به صورت مستقل عمل مى كنند.
- دسته دوم بدين صورت است كه دو چرخ كنار به هم متصل هستند و براى چرخش به سمت راست كافى است كه دور موتور سمت چپ را افزايش دهيم و براى چرخش به سمت چپ كافى است تا دور موتور سمت راست را افزايش دهيم به این نوع سیستم حرکتی سیستم کنترل تانکی گفته می شود. همانطور که در شکل زیر هم مشاهده می کنید برای کنترل ربات و چرخش به طرفین می بایست از سیستم تانکی استفاده نمود و برای حرکت به سمت چپ باید دور موتور راست را افزایش داد و دور موتور سمت چپ را کاهش داد تا ربات به سمت چپ بچرخد و اگر هم سر پیچ بخواهید دور بزنید و به سمت چپ بپیچید می بایست چرخ سمت چپ کمی به عقب حرکت کند وچرخ سمت راست نیز به جلو حرکت کند تا سرپیچ دور بزند. سیستم تانکی برای دور زدن سریعتر است. چرخ هاى كنارى را مى توان به وسيله گيربكس و يا تسمه و… به هم متصل نمود و به دليل اينكه چرخ هاى كنارى به هم متصل هستند در هنگام بالاروى از صخره ها و موانع بالارفتن يك چرخ موجب بالا رفتن چرخ ديگر مى شود به همين دليل در طراحى بدنه بايد نكات خاصى را مد نظر قرار داد.
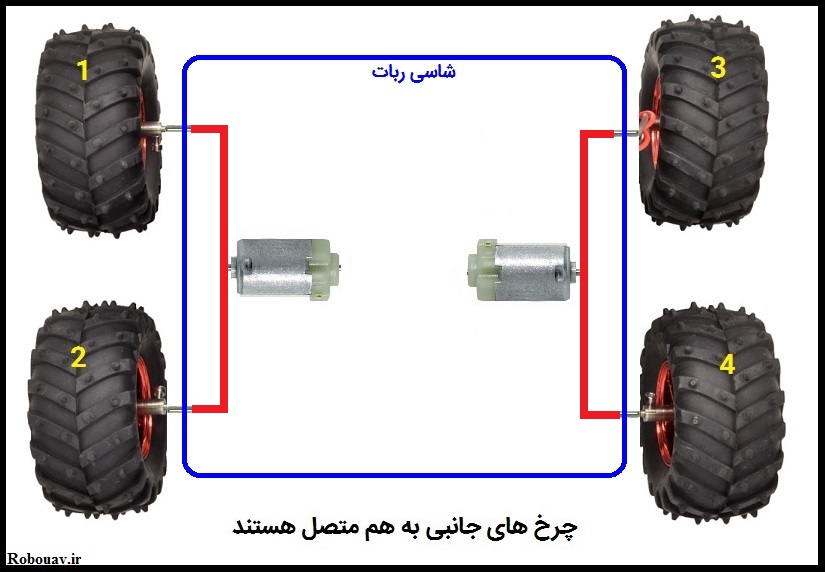 براى متصل نمودن دو چرخ به هم نيز مى توان از تسمه، چرخ دنده و يا زنجير و… استفاده كرد. به شكل زير دقت كنيد:
براى متصل نمودن دو چرخ به هم نيز مى توان از تسمه، چرخ دنده و يا زنجير و… استفاده كرد. به شكل زير دقت كنيد:

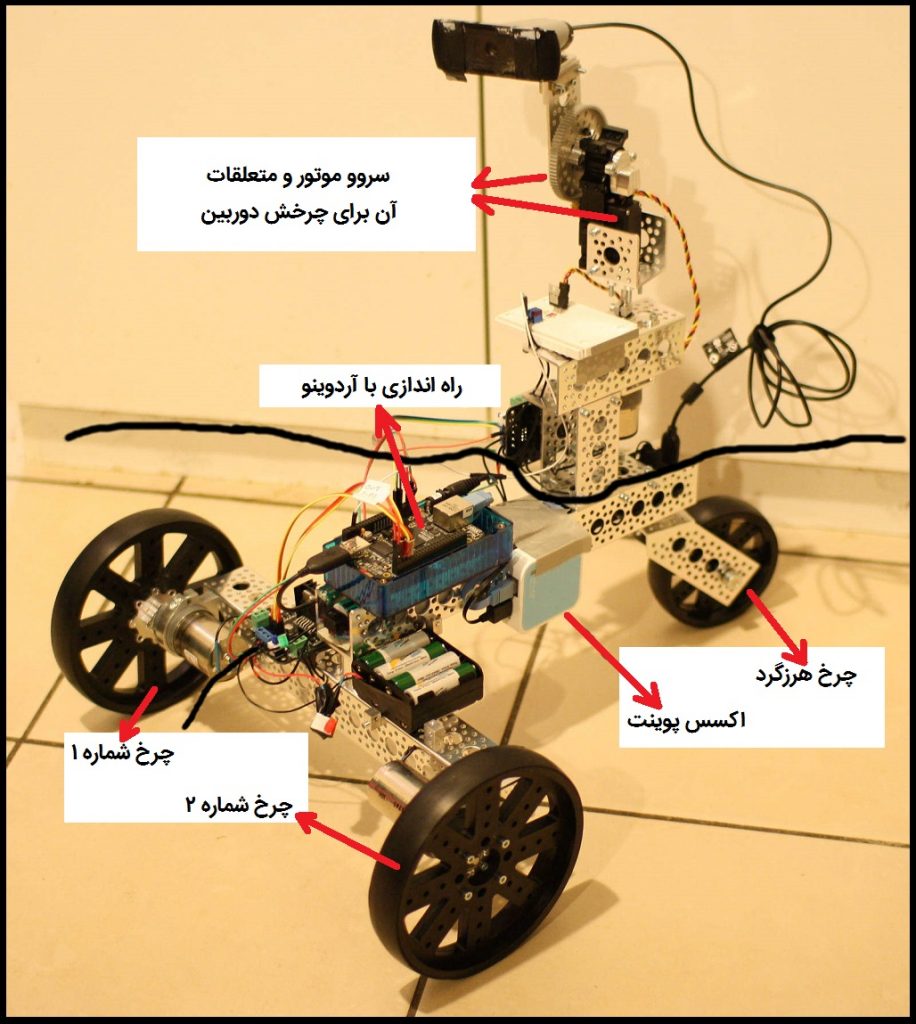
- دسته سوم بدين صورت است كه دو چرخ كار انتقال قدرت را انجام مى دهند و دو چرخ ديگر نيز به صورت هرزگرد به اين طرف و آن طرف كشيده مى شوند. برای کنترل این ربات نیز از سیستم حرکتی تانکی که در بالا بیان شد استفاده می شود. به شكل زير دقت كنيد:
ربات هاى داراى پنج چرخ و بيشتر
استفاده از پنج چرخ يا بيشتر فقط براى موارد خاص كاربرد دارد. شايد اين سوال برايتان پيش بيايد كه چه لزومى دارد كه وقتى چهار چرخ به صورت پايدار حركت مى كند از 5 چرخ يا بيشتر استفاده كنيم. استفاده از تعداد چرخ هاى بيشتر و تعداد موتورهاى بيشتر علاوه بر افزايش هزينه ها پيچيدگى طراحى را نيز بيشتر مى كند و ربات نيز مصرف بالاترى دارد. 
استفاده از تعداد چرخ هاى بالاتر مزايا و معايب خاص خودش را دارد كه در زير به آن مي پردازيم:
- در ربات هاى 6 چرخ در صورتى كه يكى از چرخ ها از كار بيفتد بقيه چرخ ها كار آن را جبران مى كنند و ربات به حركت خود ادامه ميدهد ولى اگر ربات چهار چرخ باشد و يكى از چرخ هاى آن به هر دليلى خراب شود ربات از حركت باز مى ايستد.
- فرض كنيد دو ربات داريد كه وزن هر دو يكى است ولى يكى 4 چرخ دارد و ديگرى 6 چرخ دارد. رباتى كه 6 چرخ دارد فشار كمترى را بر روى هر چرخ وارد مى كند و بالطبع چرخ نيز فشار كمترى به زمين وارد مى كند اين بدين معنى است كه در زمين هاى باتلاقى و يا شنى ربات 6 چرخ بهتر از ربات 4 چرخ عمل مى كند. تمركز تنش در ربات 4 چرخ بيشتر است.
- البته در صورتى كه ابعاد دو ربات 4 چرخ و 6 چرخ يكسان باشد قطعا وزن ربات شش چرخ بيشتر است زيرا دو چرخ اضافه تر و سيستم تعليق و متعلقات ديگر هم باعث وزن بيشتر مى شوند كه يك عيب محسوب مى شود.
- در صورتى كه وزن دو ربات 4 چرخ و 6 چرخ برابر باشد نيرويى كه براي پيشرانش هر چرخ ربات 6 چرخ لازم داريد كمتر است زيرا نيروى عمود بر سطح(N) هر چرخ نيز كمتر است. نكته ديگر هم اينكه هنگام توقف قابليت ترمزگيرى به دليل دارا بودن 6 چرخ بيشتر از 4 چرخ مى شود و به دليل چسبندگى بيشتر تايرها به زمين دور زدن در گوشه ها نيز سريع تر است.
اين جلسه هم به پايان رسيد. براى اطلاع از مطالبى كه در آينده منتشر مى شود و يا مطالبى كه در كانال ما منتشر مى شود مى توانيد ما را در محيط هاى مجازى دنبال كنيد.
مطالب زیر را حتما بخوانید
-

راه اندازی ماژول جوی استیک{جلسه سی و سوم}
121 بازدید
-

آموزش راه اندازی ماژول بلوتوث HC-05{جلسه سی و دوم}
218 بازدید
-

آموزش راه اندازی سنسور آلتراسونیک HC-SR04 {جلسه سی و یکم}
131 بازدید
-

راه اندازی موتور دی سی با درایور DRV8833{جلسه سی ام}
123 بازدید
-

راه اندازی موتور دی سی با درایور L293D {جلسه بیست و نهم}
152 بازدید
8 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
سلام
آیا بعد از پرداخت اشتراک مطالب می تونم پرینت و کپی کنم؟ الان امکان چنین کاری نیست. اینطوری هم سخت باید هرسری انلاین شد و زمان برای چنین کاری محدود دارم.و هم مطالب چون به صورت فیلم نیست اذیت کننده است که مدام تو کامپیوتر به صورت انلاین خواند.
اگه میشه یه کاری کنیدمطالب به صورت کاغذ جزوه ای یا حداقل فیلم باشه.
قسمت تماس با ما سایت و پیشخوان برای ارسال پیام error میده.لطفا یه راه ارتباطی آسان قرار بدید.nasaisa@yahoo.com
با سلام. همانطور که گفته شد میتوانید صفحات وب را به صورت PDF ذخیره کنید و سپس آن ها را پرینت کنید و از آن استفاده کنید.
در مورد راه های ارتباطی نیز میتوانید لیست آموزش های مورد نظر خود را به آدرس robouav@gmail.com ارسال کنید.
موفق باشید.
سلام
قسمت تماس با ما سایت error میده؟ لطفا یه راه ارتباطی از طریق تلگرام یا شماره موبایل هم اضافه کنید
با سلام.
پاسخ داده شد.
سلام
ممنون از سایت بسیار خوبتون
من دیدم تیم خوبی رو باهم شما آقایان قاسمی تشکیل دادید و زحمت زیادی در امر اموزش می کشید جا داره در اینجا ازتون تشکر کنم.
لطفا مطالب سایت متفاوت از سایت های دیگر قرار دهید مثلا آموزش زیردریایی یا آموزش هواپیما خورشیدی یا ربات خورشیدی و… آموزش هایی که در سایت های دیگه اصلا نیست.
آیا با پرداخت اشتراک می تونم مطالب رو کپی و پرینت بگیرم؟ چون نه زمان کافی برای سرزدن به سایت و خواندن مطالب به صورت آنلاین ندارم از طرفی برای بیناییم خوب نیست.
با سلام. سپاس از لطف و محبت شما.
لطفا برای درخواست آموزش از قسمت تماس با ما درخواست خود را ارسال فرمایید. همچنین برای استفاده از مطالب سایت میتوانید پس از پرداخت حق عضویت ، صفحات را به صورت PDF ذخیره و از آن به برای مصارف شخصی استفاده کنید.
موفق باشید.
سلام عرض خسته نباید خدمت شما…
ممنون از اطلاعات مفید و جامع که بدوندهیچ چشم داشتی به دوستان علاقه مندی چون بنده کمک میکنید…
در کانال عضو هستم و میخاستم اگر امکانش داره گروهی در تلگرام در مضوع مرتبط با رباتیک بخصول مدل های پروازی معرفی کنید که امکان چت کردن با استادانی چون شما مهیا باشد و از اطلاعاتتون بهره مند بشیم. سپاسگزارم موفق باشید
با سلام خدمت شما.
متاسفانه تنها راه ارتباطی سایت می باشد و هر گونه سوالی از طریق کامنت ها پاسخ داده خواهند شد.
موفق باشید.